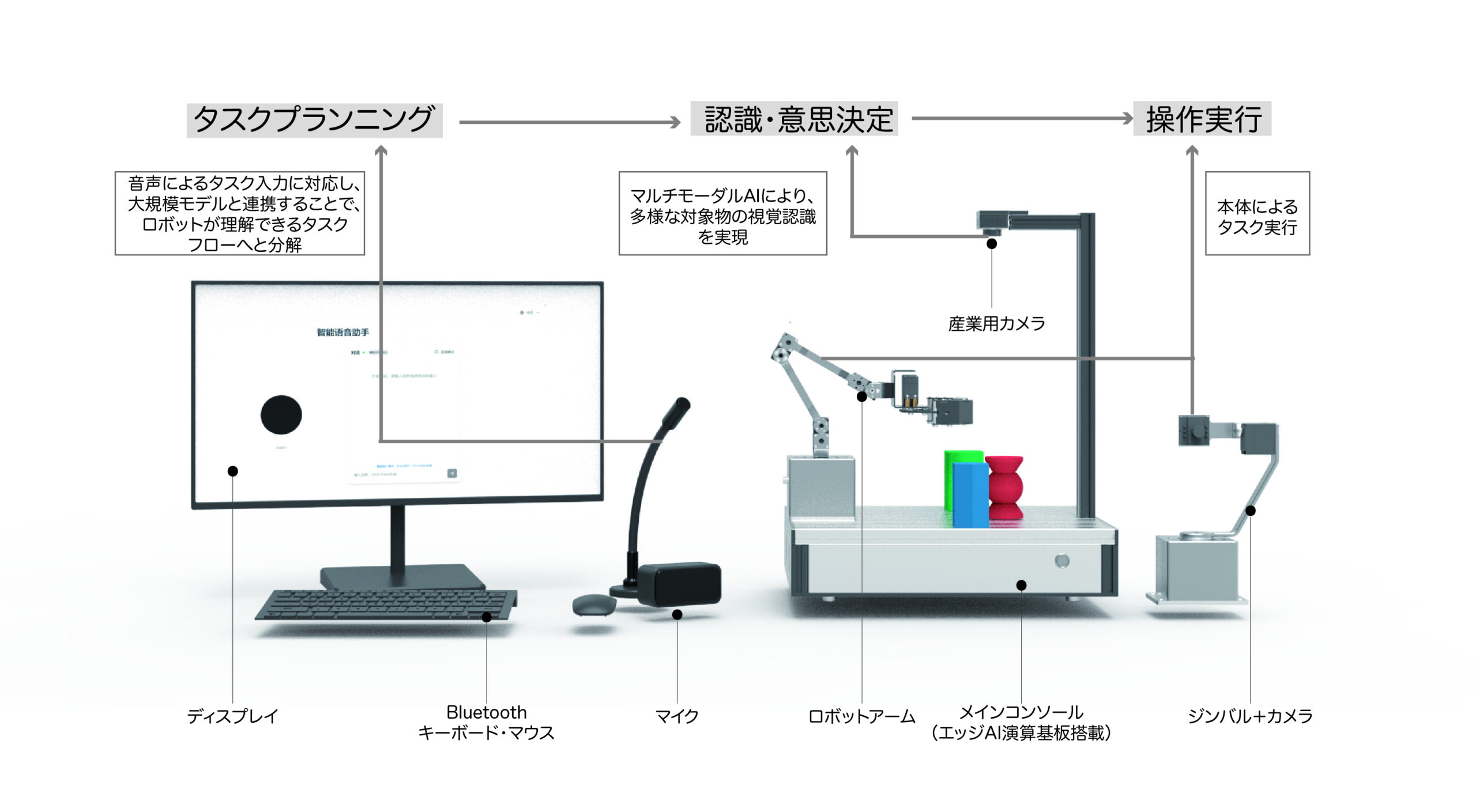
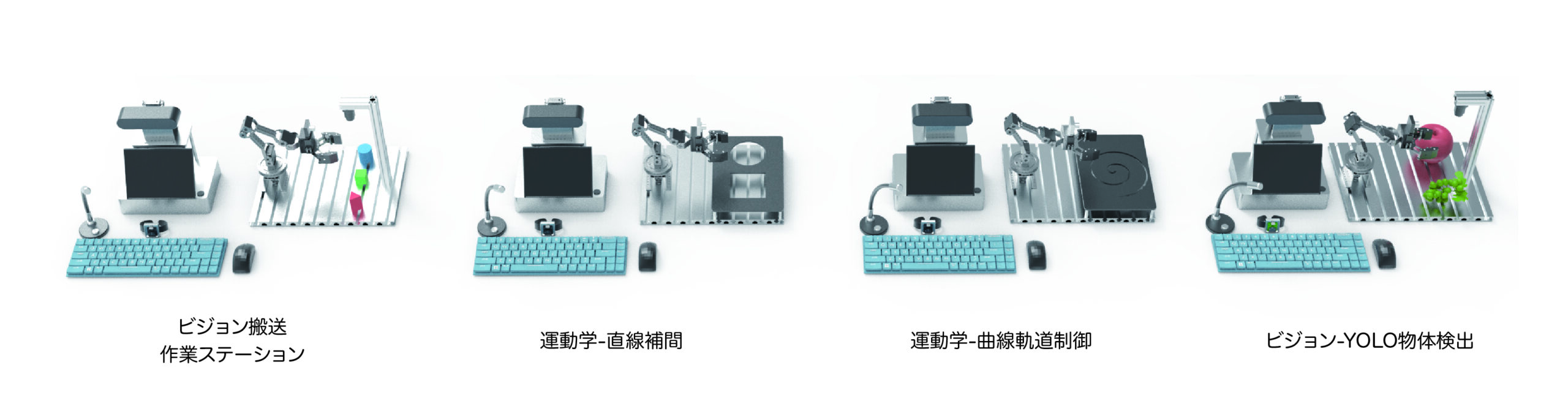
RAI-P4 Embodied AIタスク計画実習プラットフォーム 学びから実践へ、知能を動かす RAI-P4は、AI技術とロボット技術を高度に融合した、具身知能実習プラットフォームである。AI音声、AIビジョン、代表的な4自由度ロボットアーム、各種センサーおよびAI組み込み制御ボードを統合し、実機ロボット環境において、知能アルゴリズムの実装およびデバッグを行う。これにより、理論学習と実践応用をシームレスに接続する。本プラットフォームは、「具身タスク計画―認識・判断―操作実行」の3ステッププロセスに基づき、多様な実験シナリオを提供する。音声対話、タスクの意味理解、ビジョン雲台追従、視覚によるロボットアーム搬送、運動学軌道制御、AIビジョンによる果物・野菜検出など、幅広い内容をカバーする。 ■ 対象分野・活用シーン AI・ロボット教育 大規模モデル応用 機械学習 マシンビジョン ROS 組み込み開発 センサー計測・制御 システム統合 製品特長 タスク計画フロー図 ■ AIとロボット技術のシステム統合 インテリジェントロボットアームを中核とし、AI音声インターフェース、AIビジョン認識、AI組み込み制御ボードを搭載する。さらに、カラー認識センサーや姿勢検知センサーなどの各種デバイスを組み合わせ、知覚から判断、実行に至るまでの一連のプロセスに対応した教育を実現する。 ■ ワンストップ導入 出荷時にソフト・ハードの調整を完了し、追加設備なしで即運用可能。約60cm×60cmの省スペースで、研究室やモバイル授業に柔軟に対応する。 ■ 段階的に学べるロボットアームプラットフォーム 4自由度アームを基盤に、6自由度への拡張に対応。運動学、制御、シミュレーション、ROSを通じて、設計スキルを段階的に習得する。 視覚搬送と運動学統合実習 仕様・スペック ■ 基本仕様 ロボットアーム 4自由度シリアルアーム + 1自由度グリッパ アーム長さ 260mm 可搬重量 300g ジンバルモデュール 2自由度ジンバル+高解像度カメラモジュール 単眼カメラモデュール 720P/200万画素 ディスプレイモデュール 13インチ RDK X5ボード ROS・Ubuntuプリインストール/10TOPSの演算性能 マイク・スピーカーモデュール 音声対話用 ウェアラブルジェスチャーモデュール ジャイロセンサー搭載、ストラップ付きで装着可能 キーボード・マウス ロジクール製ワイヤレスBluetoothキーボード・マウス コントローラモデュール ワイヤレスコントローラ ■ ソフトウェア構成 Ubuntu/ROS2などをプリインストールし、開梱後すぐに開発・デモが可能。OpenCV、YOLO、LLM SDKなどの主要フレームワークに対応し、教育から研究まで幅広く活用できる。 ■ センサー構成 AI音声、視覚認識、およびロボット動作に関わる各種フィードバックセンサーを網羅し、具身タスク計画におけるマルチモーダル入力に対応する。 AI音声インターフェース用マイクアレイ ビジョン用パン・チルトカメラモジュール カラー認識センサー 姿勢検知センサー 物体認識/距離検知用拡張インターフェース ■ コントローラ構成 AI組み込み制御ボードとオープンI/Oインターフェースを内蔵し、大規模モデル推論やビジョンアルゴリズムの実行に対応する。さらに、ロボットアーム駆動や各種外部機器との接続が可能であり、ソフトウェアとハードウェアの一体的な協調制御を実現する。 実験項目 大規模モデルの導入と応用 ■ 音声認識 ASR■ 自然言語理解 LLM■ 音声合成 TTS■ Function Calling による電卓対話■ Function Calling による音楽再生対話■ Function Calling によるクラウドビジョンシステムのタスクプランニング ■ Function Calling によるロボットビジョンシステムのタスクプランニング ロボットビジョンと機械学習 ■ 色認識■ 形状認識■ YOLO のデプロイ■ 顔検出■ 顔追跡・ワーク検出■ ワークのビジュアルピッキング ロボット工学基礎 ■ ロボットアーム運動学による定点運動■ ロボットアーム運動学による直線補間■ ロボットアーム運動学による円弧補間 ロボットオペレーティングシステム ROS ■ ROS 基礎■ キーボードによるロボットアーム制御■ Moveit! によるロボットアーム動作計画■ ビジョン検出ワークステーション センサ検出と制御 ■ 姿勢検出■ 姿勢制御によるロボットアーム制御■ ビジョン検出■ ビジョントラッキング■ ビジョン搬送 組込み開発と応用 ■ Linux 操作基礎■ シリアル通信実験■ ソケット通信実験■ マルチスレッド実験■ GUI 設計実験