RAI-P4 is an embodied AI training platform that deeply integrates artificial intelligence and robotics technologies.
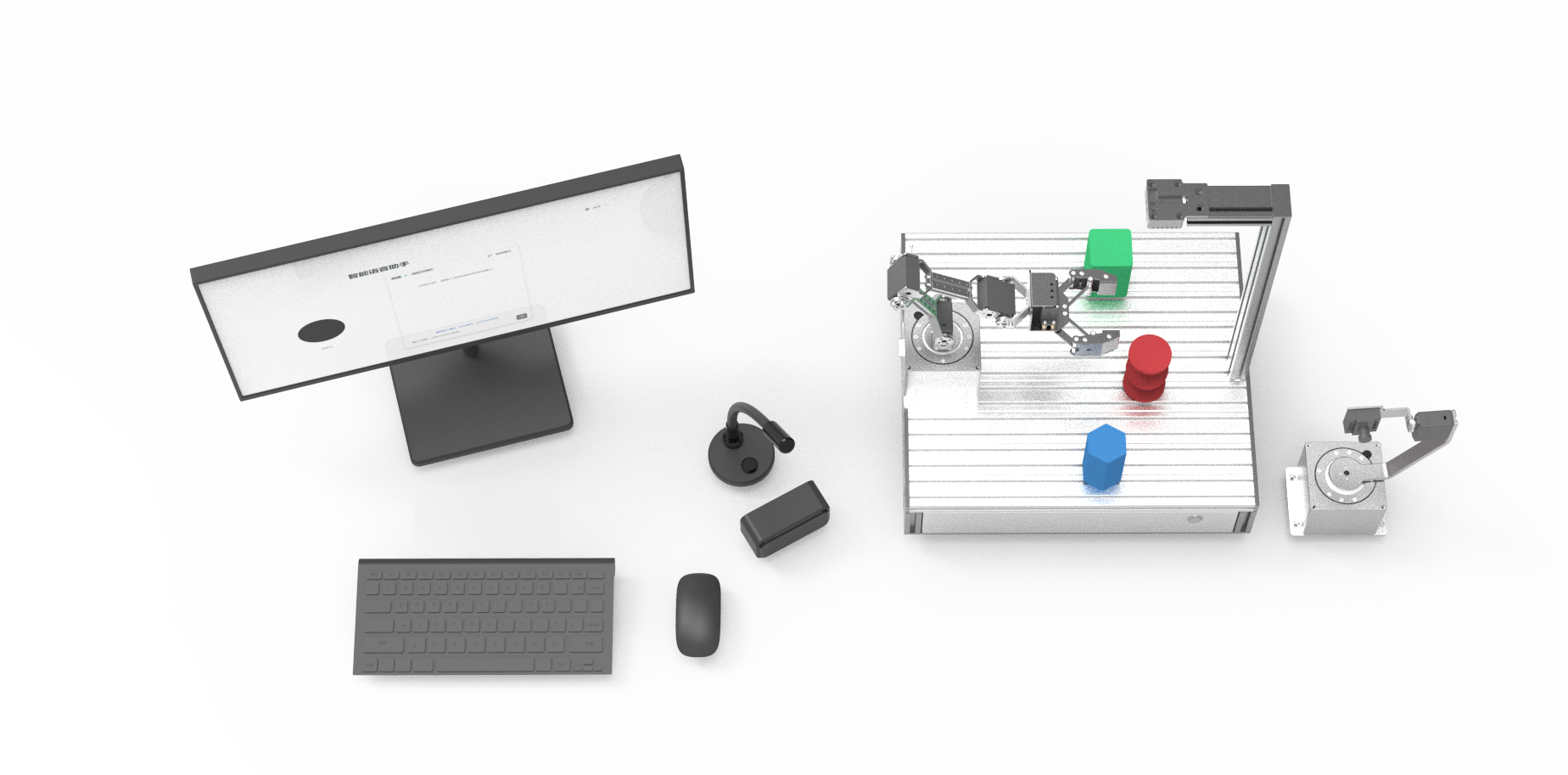
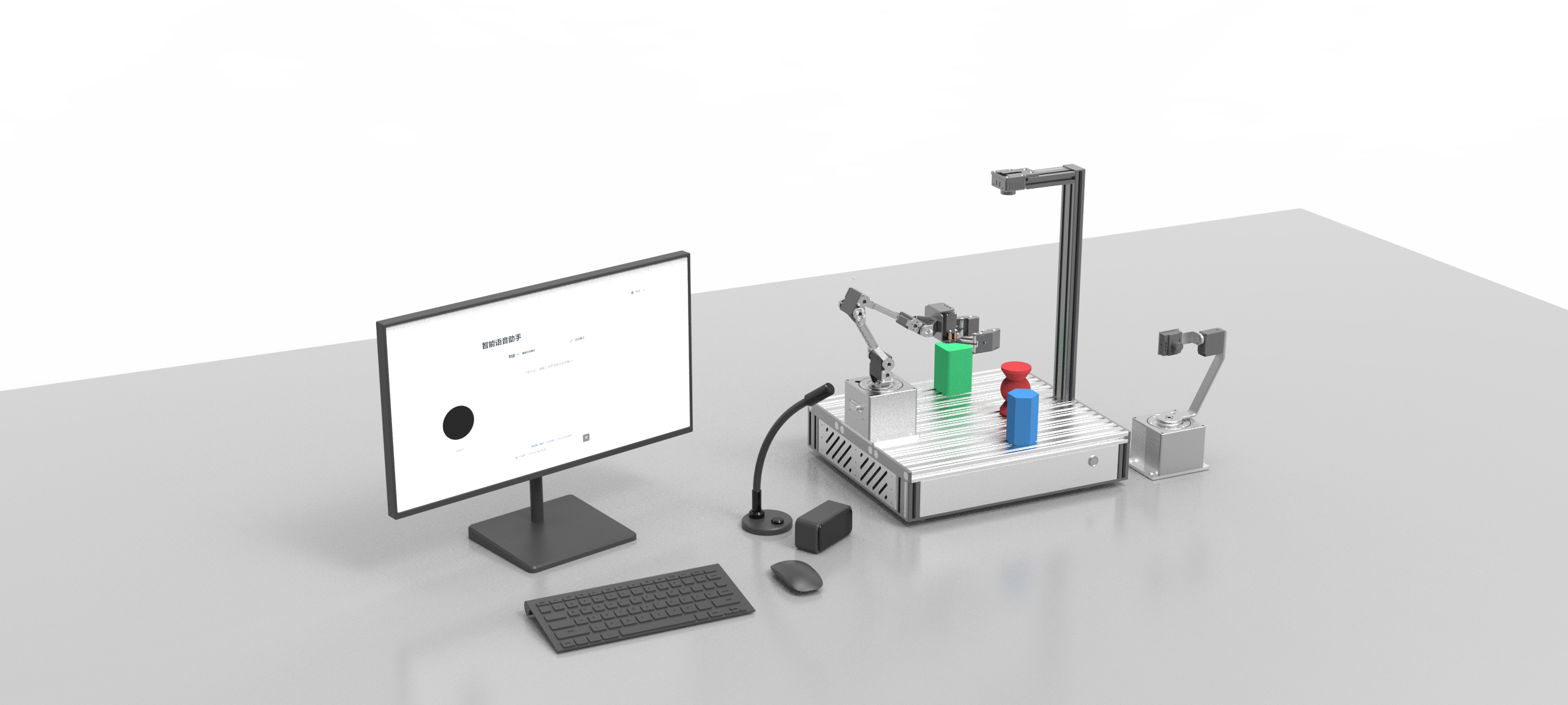
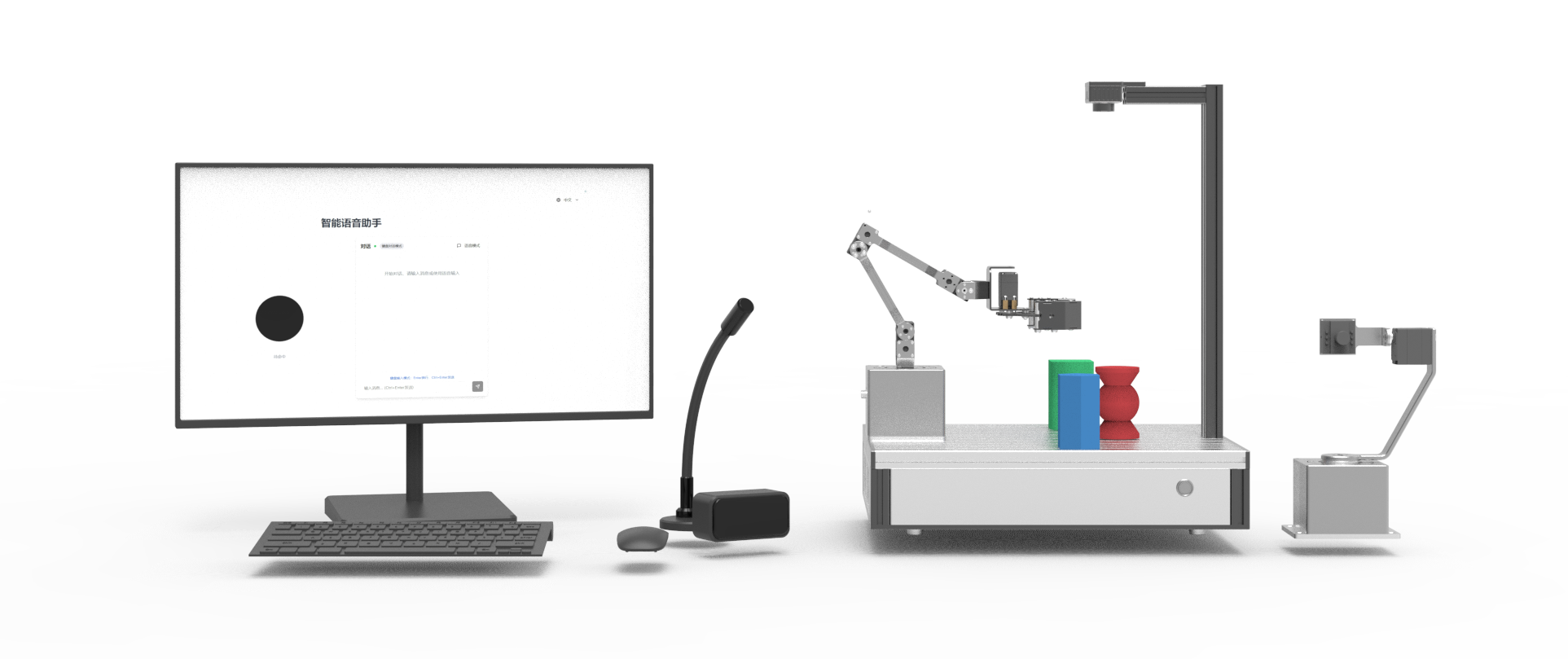
The system integrates AI voice, AI vision, a 4-DOF robotic arm, multiple sensors, and an AI embedded control board to provide a real-robot environment for implementing and debugging intelligent algorithms, seamlessly bridging theory and practice.
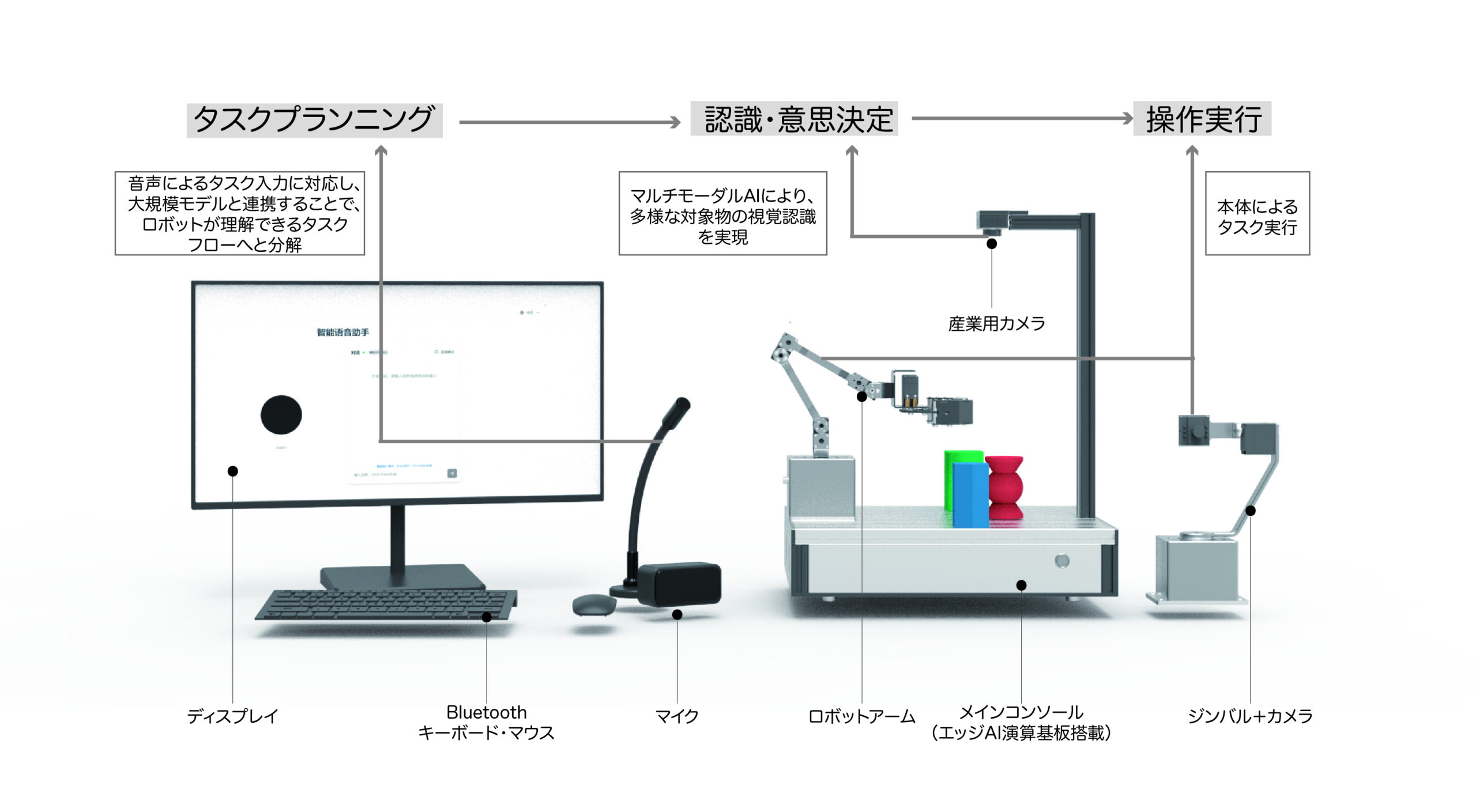
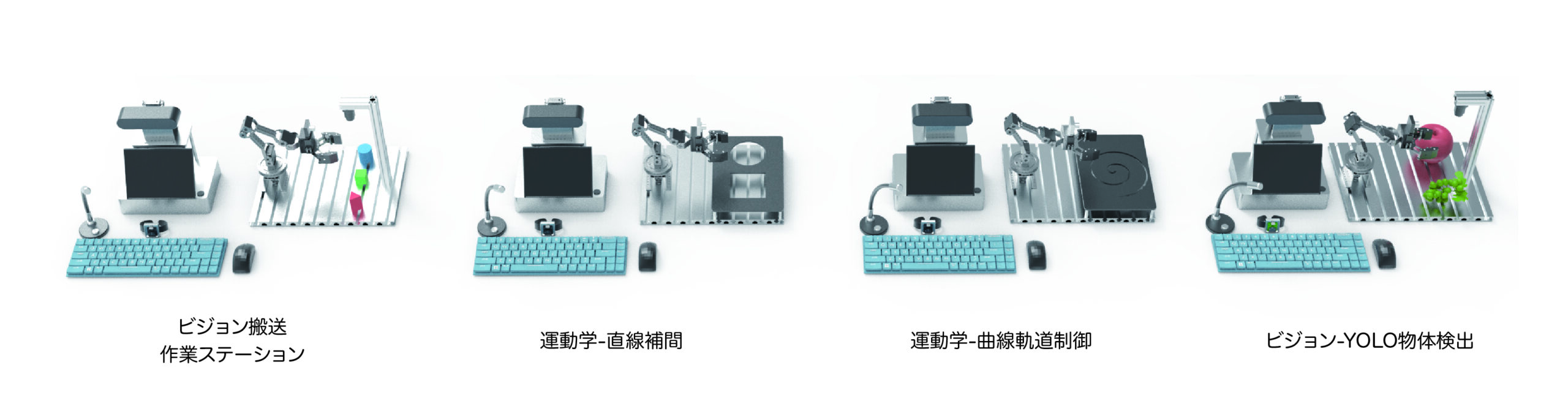
This platform provides diverse experimental scenarios based on a three-step process: embodied task planning, perception and decision-making, and action execution.
It covers a broad set of capabilities, including voice interaction, semantic task understanding, vision-based pan-tilt tracking, vision-guided robotic arm manipulation, kinematic trajectory control, and AI vision-based fruit and vegetable detection.