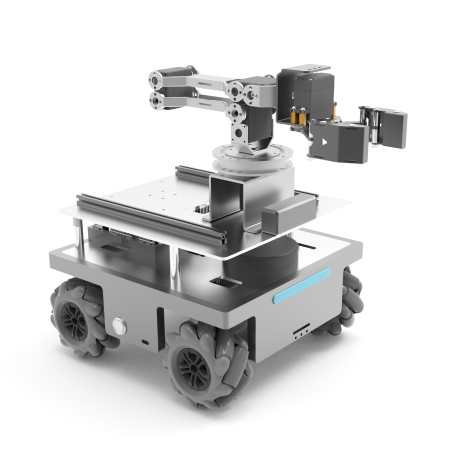
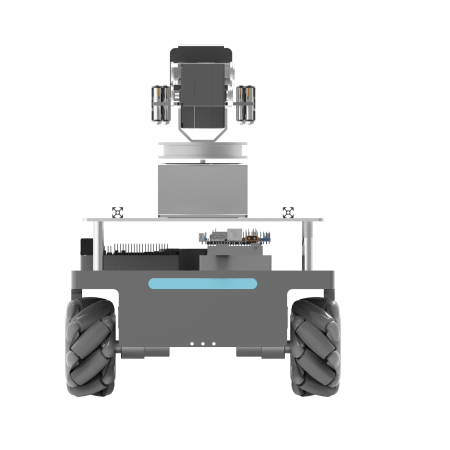
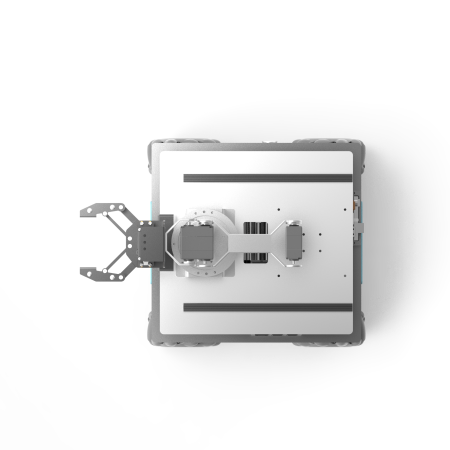
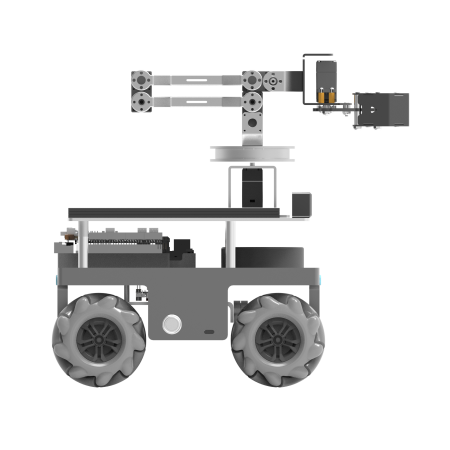
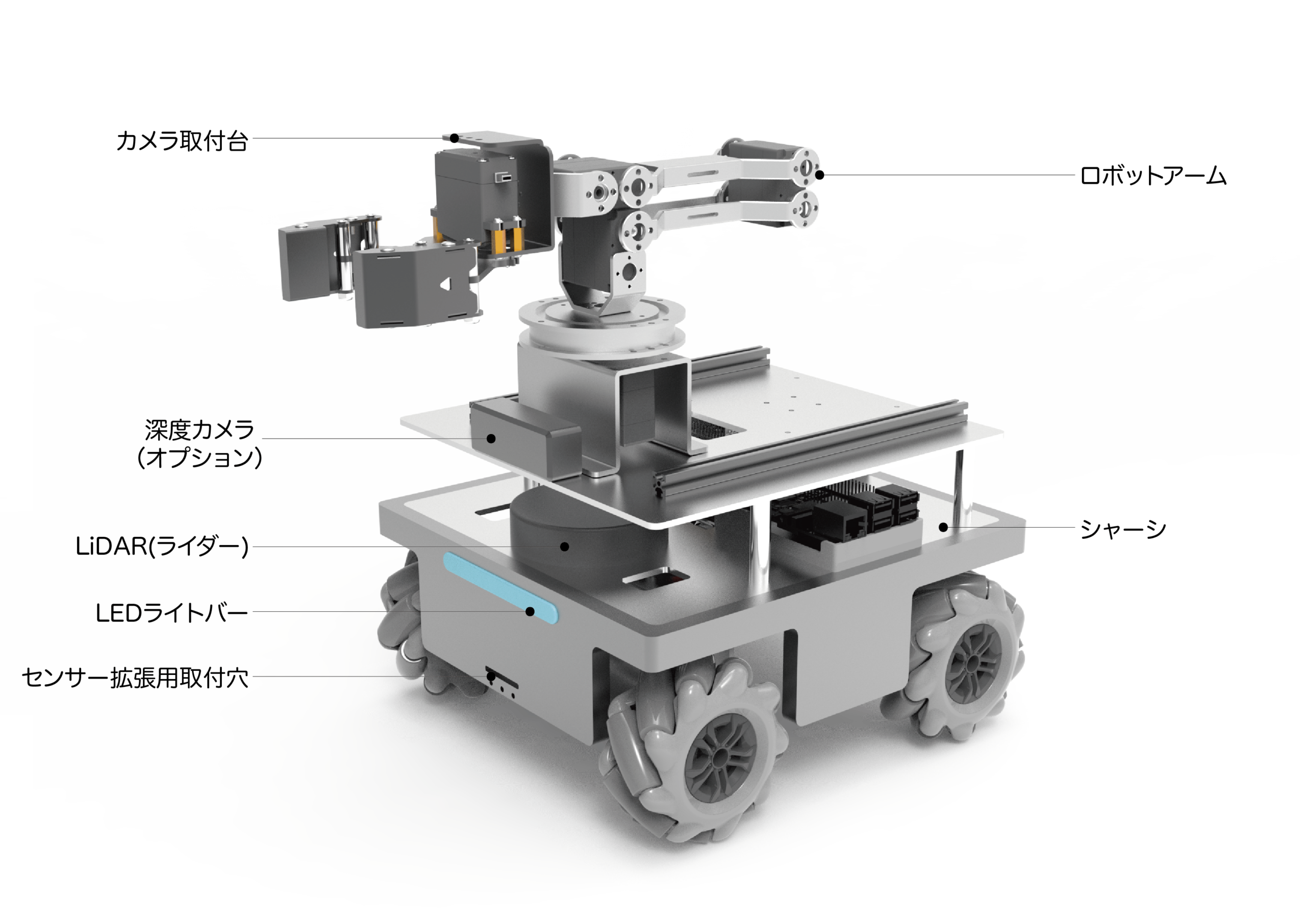
RAI-M4 フィジカルAI学習プラットフォーム 自然言語から行動へ認識・判断・操作を一体化した具身知能を、ひとつに RAI-M4は、「計画・認識・実行」を統合し、AIによる高度なインタラクションと柔軟なタスク遂行を実現するロボットプラットフォーム。自然言語からタスクへの変換とマルチモーダル認識に対応し、多様なシナリオに柔軟に適応。メカナムホイールによる全方向移動と4自由度アームを搭載し、高い機動性と操作性を両立。デュアル制御によりAI処理とリアルタイム制御を最適化。ロボット技術とAIを統合した実践プラットフォームとして、教育分野で幅広く活用可能。 ■ 対象分野・活用シーン 移動ロボット運動制御 AIモデル応用 ロボット工学 マシンビジョン ROS ナビゲーション制御 自己位置推定 製品特長 AIによる高度な知能化 自然言語理解とマルチモーダル認識に対応し、タスク計画から実行までを一体化。 移動・操作一体型プラットフォーム 全方向移動とロボットアームを統合し、狭小空間でも柔軟な作業を実現。 体系化された実習設計 段階的に学べるモジュール構成で、幅広い教育シーンに対応。 仕様・スペック ■ 基本仕様 OS環境 Ubuntu 22.04 / ROS 2 アルゴリズム環境 OpenCV / YOLOv8 対応可能な言語モデル Qwen / DeepSeek / ChatGPT / Gemini / Claude ※各API連携対応 外形寸法 240mm × 240mm 以上 シャーシ構成 4輪メカナムホイール全方向移動シャーシ 定格荷重 10kg 最大速度 0.5m/s センサー ジャイロセンサー内蔵 ロボットアーム 4自由度シリアルアーム + 1自由度グリッパ アーム長さ 240mm 可搬重量 300g 制御システム構成 上位機:タスク計画・視覚認識・ナビゲーション制御 下位機:PID制御・サーボ制御・インタラクション制御(通信中継) ■ ハードウェア仕様 エッジコントローラ 型番 RDK X5 演算性能 10 TOPS CPU 8コア Arm Cortex-A55(1.5GHz) BPU 10 TOPS GPU 32 FLOPS メモリ 8GB LPDDR4 ストレージ TFカード対応 備考 YOLOv8による顔検出は約100fpsで動作 LiDARセンサー 測定距離 0.12~8 m サンプリング周波数 4000回/秒 スキャン周波数 5~10 Hz 角度分解能 0.6°~1.2° 質量 135 g ビジョンカメラ タイプ RGB高解像度カメラ 画素数 200万画素 インターフェース USB 3.0 S/N比 27 dB 動作電流 80~280 mA ■ オプション 深度カメラ 深度モジュール測距範囲 0.6m~8m 深度モジュール解像度 最大1280×720(90fps) 200万画素 深度モジュール視野角(FOV) 水平54.8° / 垂直45.5° RGBカラーモジュール解像度 最大1920×1080(30fps) RGBカラーモジュール視野角(FOV) 水平66.1° / 垂直40.2° 実験項目 ロボットビジョン 基礎的な画像処理から深層学習、マルチモーダル認識まで、一貫した実践学習の流れを構築。 ■ OpenCVビジョン ・色認識、形状認識、QRコード認識、バーコード認識 ・カラーマーカー検出(総合処理+フィルタリング) ■ AIビジョン – YOLO ・YOLOモデルの導入・デプロイ ・データセットのアノテーション、学習、デプロイ ・ワーク検出 ・顔検出 ■ AIビジョン – 通義千問マルチモーダル大規模モデル ・通義千問マルチモーダルAPIの導入・デプロイ ・物体検出およびラベリング 大規模モデルの導入と応用 音声インタラクション、マルチモーダル認識、ロボット実行を統合した、エンドツーエンドのAIモデル実践にフォーカス。 ■ 音声対話インタラクション ・音声認識(ASR)の導入・実装 – 通義千問 ・意味理解(LLM)の導入・実装 – DeepSeek ・音声合成(TTS)の導入・実装 – 火山引擎 ・大規模モデルを活用した音声対話機能の実装 ・音声対話による電卓機能の実装 ・音声対話による音楽再生機能の実装■ マルチモーダル視覚認識 ・通義千問マルチモーダルAPIの導入・デプロイ ・物体検出およびラベリング■ ロボット応用との連携 ・MCPに基づく認識・把持タスクプランニング ・MCPに基づくナビゲーションタスクプランニング ロボット本体 シャーシおよびロボットアームの運動学と制御戦略に関する実践。 ■ モバイルベース制御 ・エンコーダ付きモータのPID制御 ・全方向移動ベースの運動学制御 ・全方向移動ベースのオドメトリ制御(ジャイロセンサ含む)■ ロボットアーム本体制御 ・サーボモータの位置制御 ・ロボットアームの運動学制御 ・ロボットアームの補間軌道制御 ロボットオペレーティング システム(ROS) ROSのトピック、サービス、パラメータ管理およびMoveItによるモーションプランニングなどの中核スキルを習得。 ■ ROSの基礎操作 ・Topic、Service、Parameter による turtlesim の移動制御 ・パッケージ移植と実行 – キーボードによる turtlesim 制御■ Moveit! によるロボットアーム動作計画 ・ロボットアームのURDFファイル設定 ・Moveit! によるロボットアーム運動学モデルの設定 ・RViz によるロボットアーム動作計画の実現 移動ロボットのナビゲーション と自己位置推定 システムインターフェース、マッピングおよびナビゲーションの一連のプロセスを網羅し、マルチポイントナビゲーションの実践に対応。 ■ 地図構築 ・マッピング用プロジェクトファイルの設定 ・新規地図の構築 ■ 地図ナビゲーション ・指定点ナビゲーションの実装 ・自律回避ナビゲーションの実装 ・複数座標ナビゲーションの実装