GX-MAT-09Sは、具身知能ロボットの構造・駆動・知能システムを体系的に学べる実習プラットフォームである。
具身知能ロボットは、意思決定・知覚・操作能力を統合し、非構造環境でタスクを実行する次世代ロボット技術であり、その代表形態が移動型複合ロボットである。
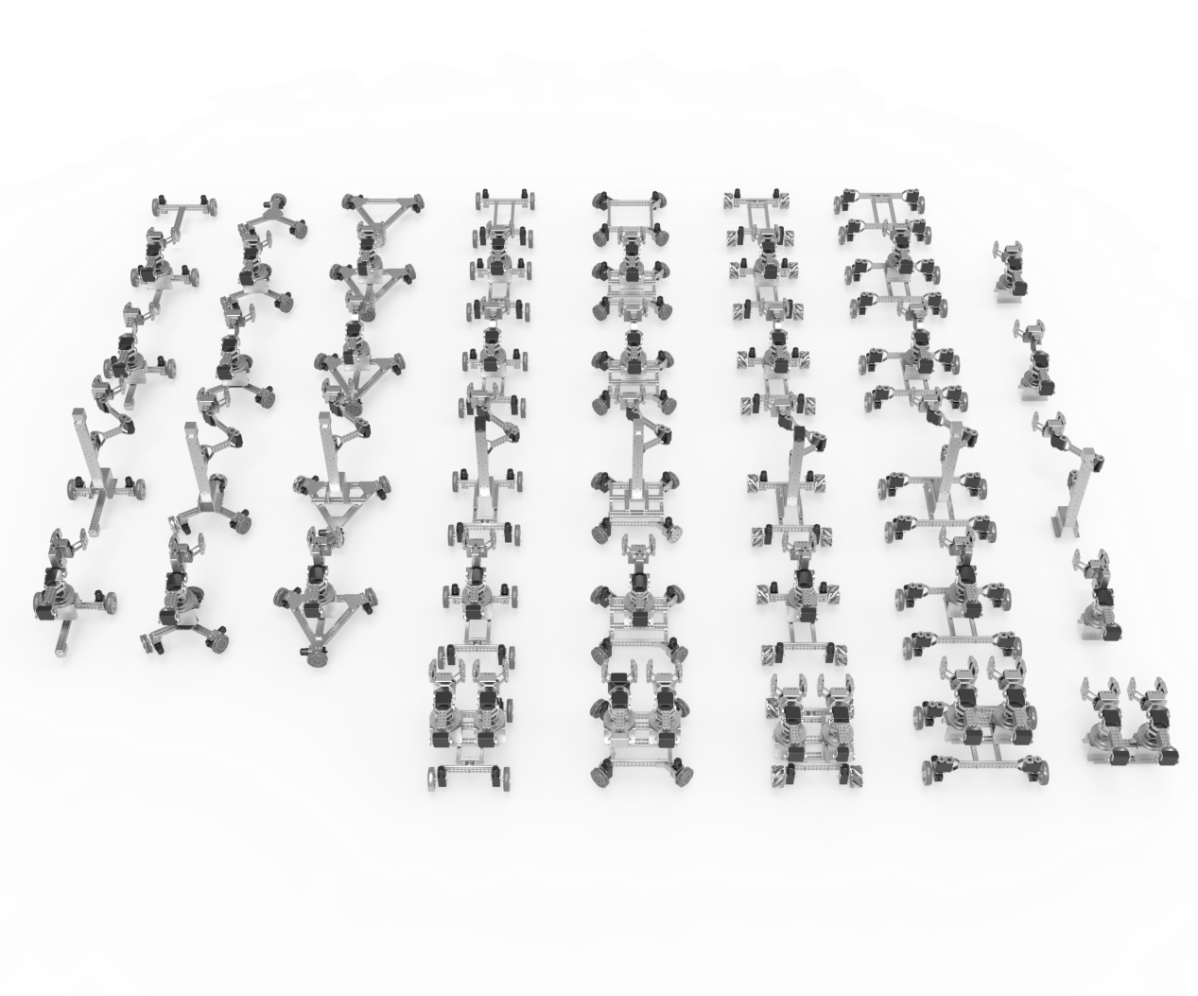
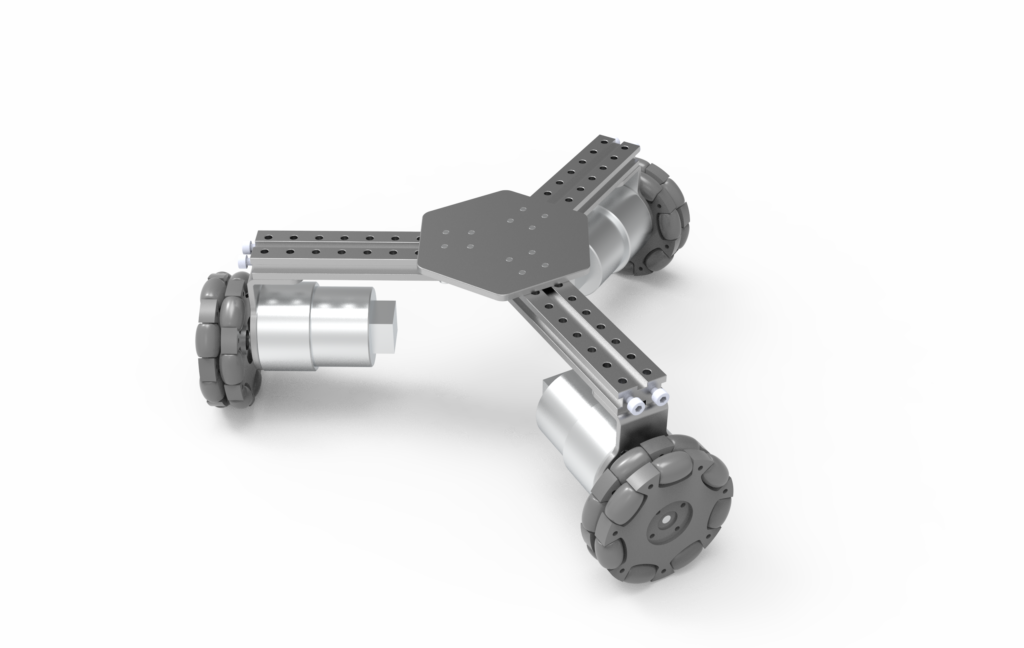
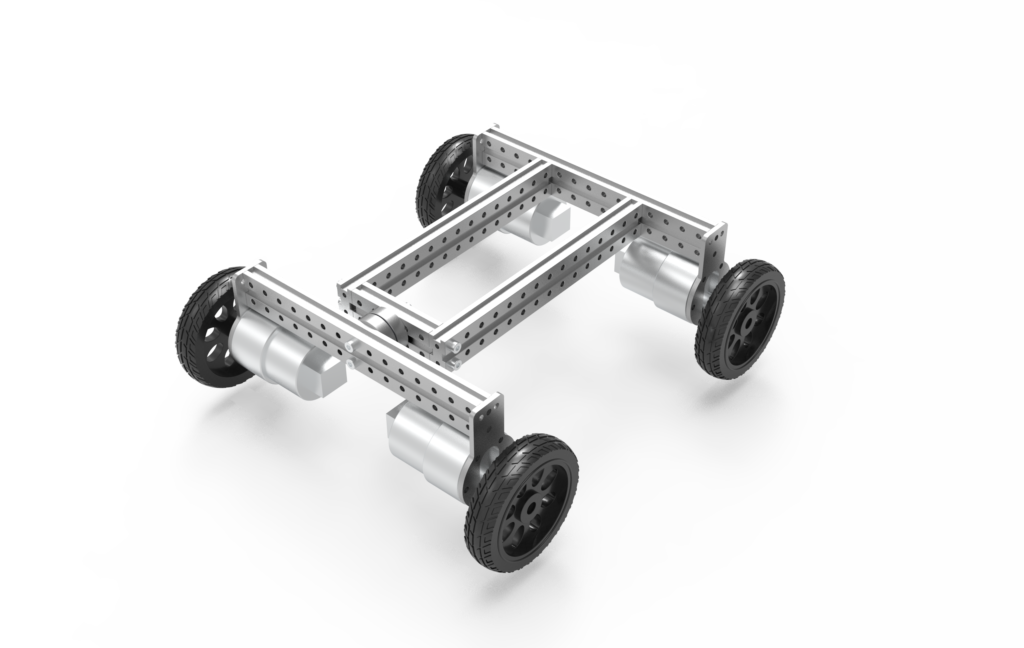
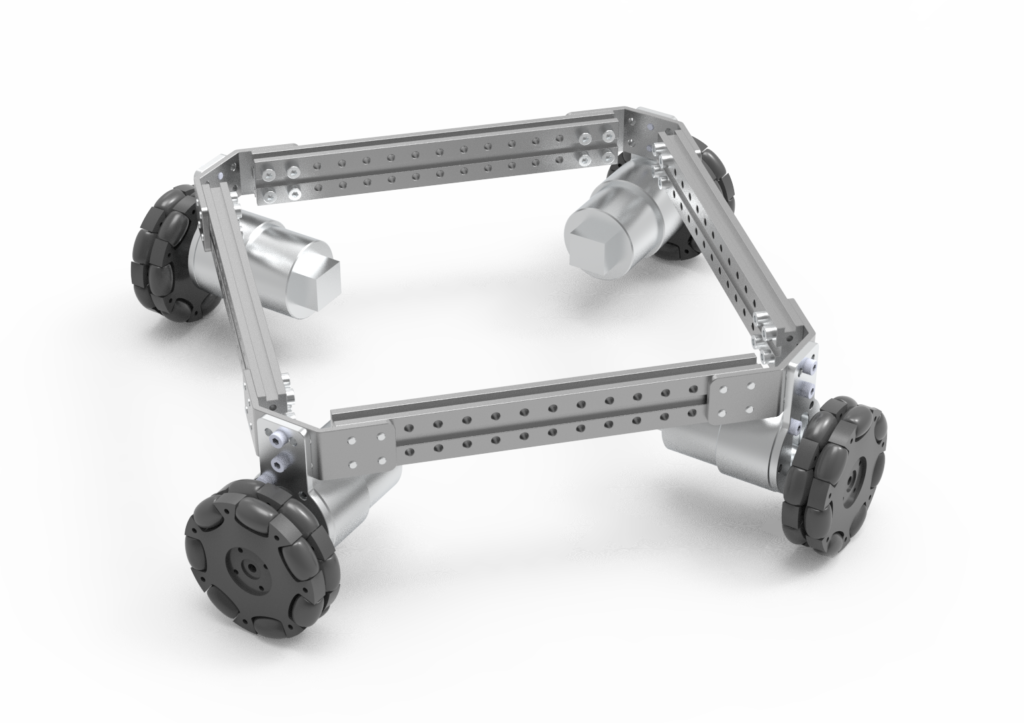
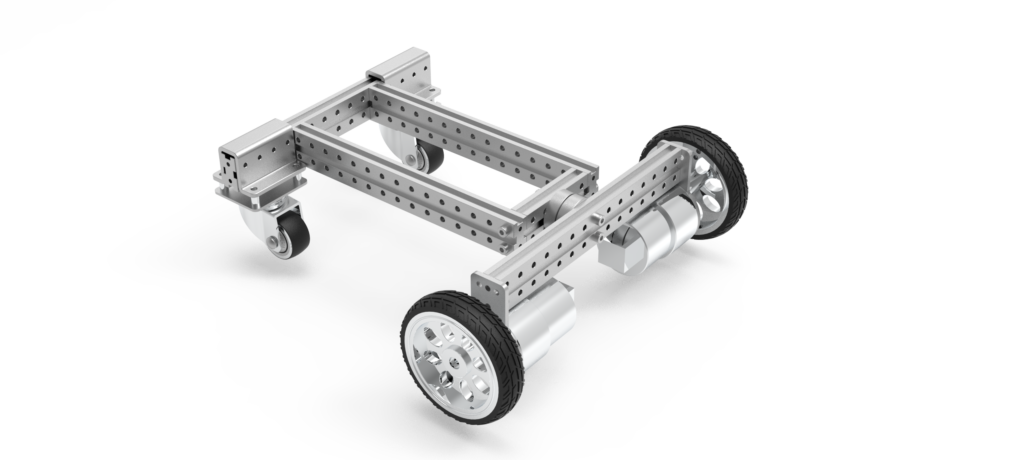
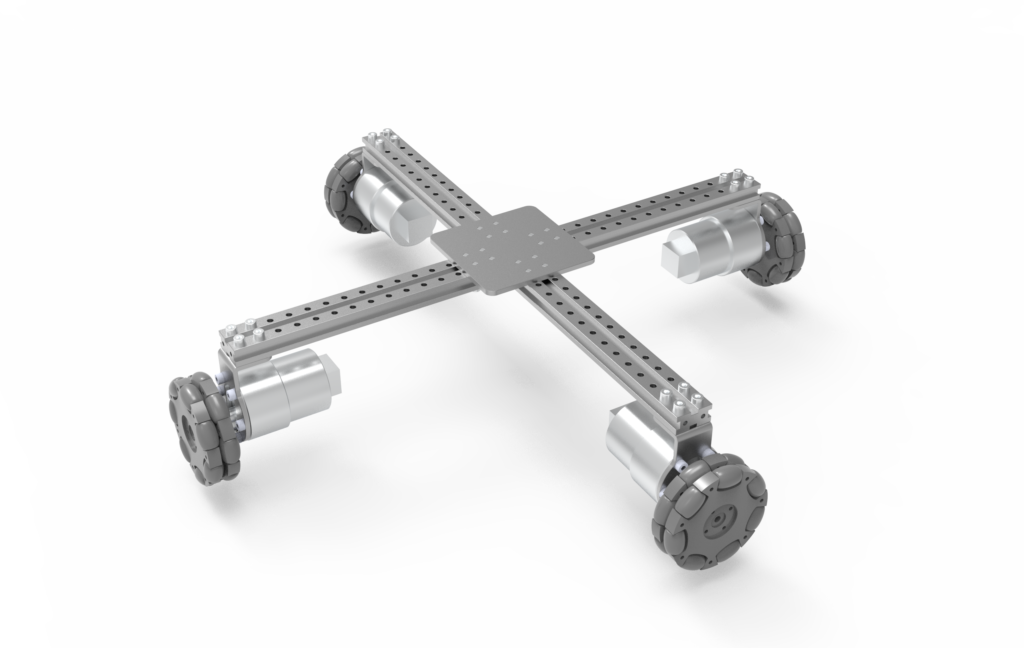
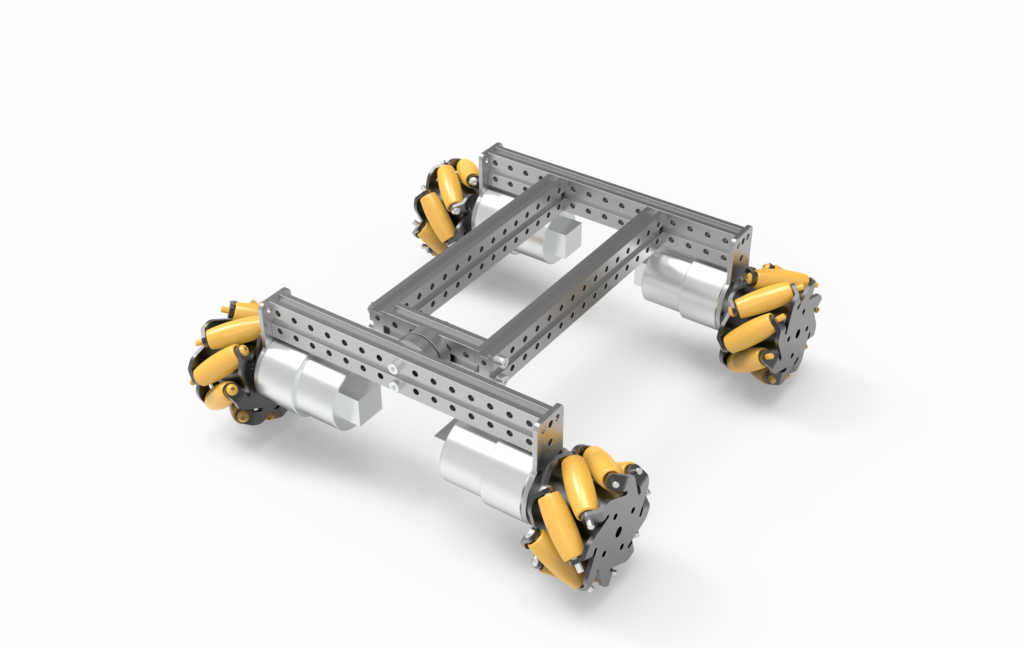
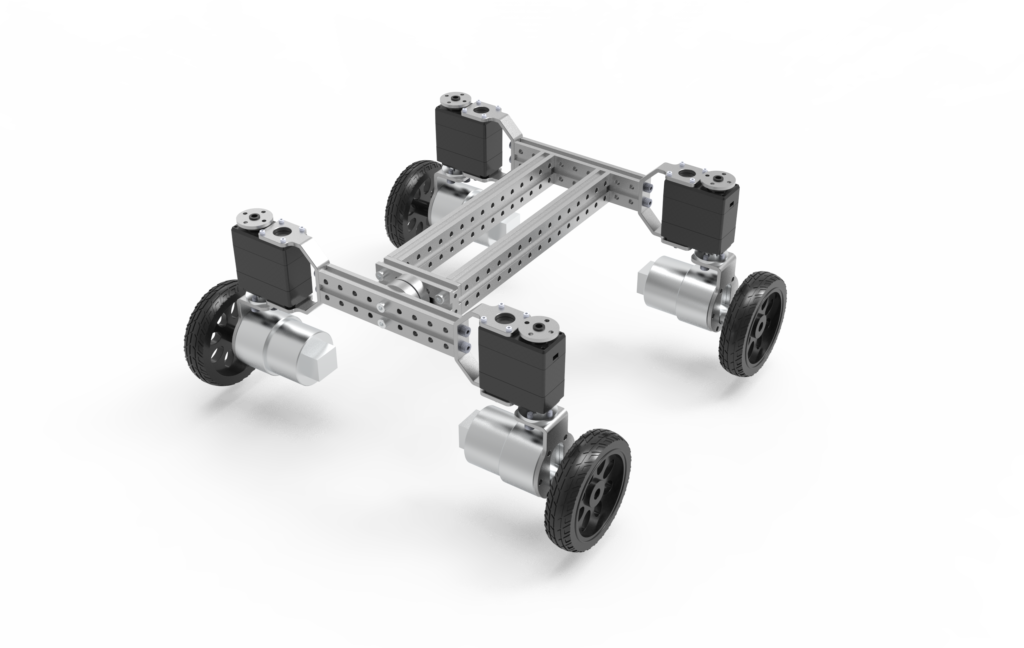
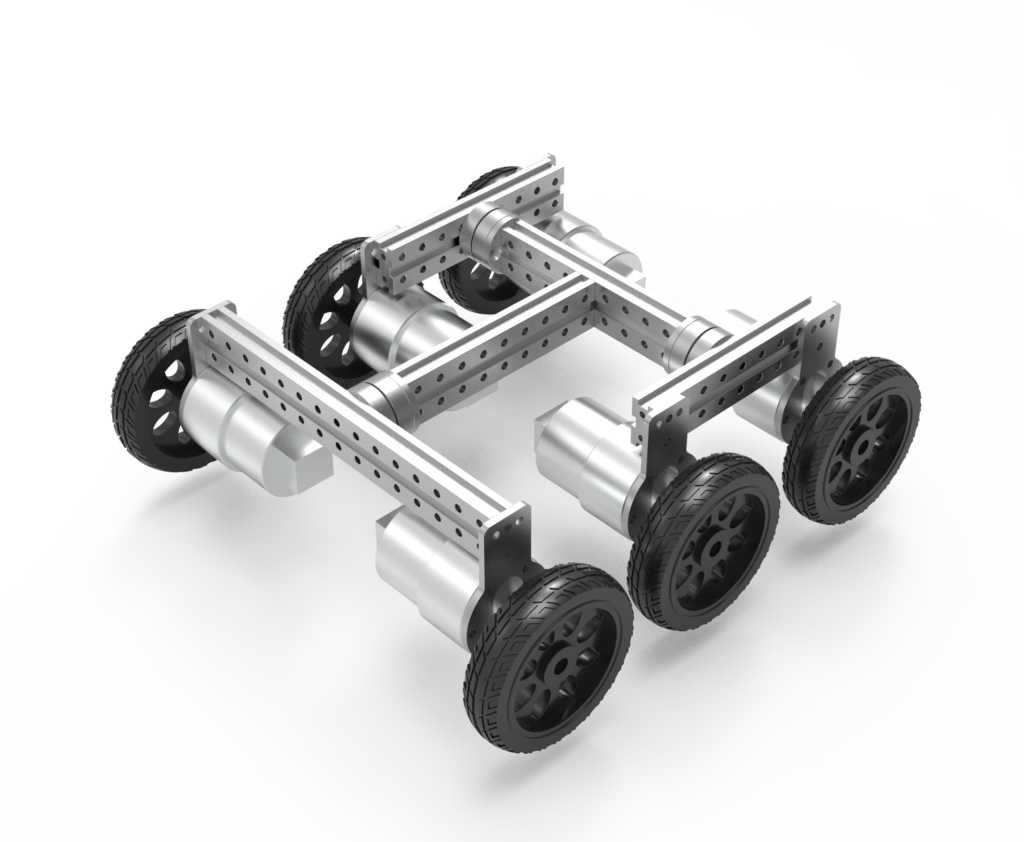
本プラットフォームは、典型的な具身複合ロボットをモデュール単位で分解し、構造・駆動・知能システムの理解を深めることができる。
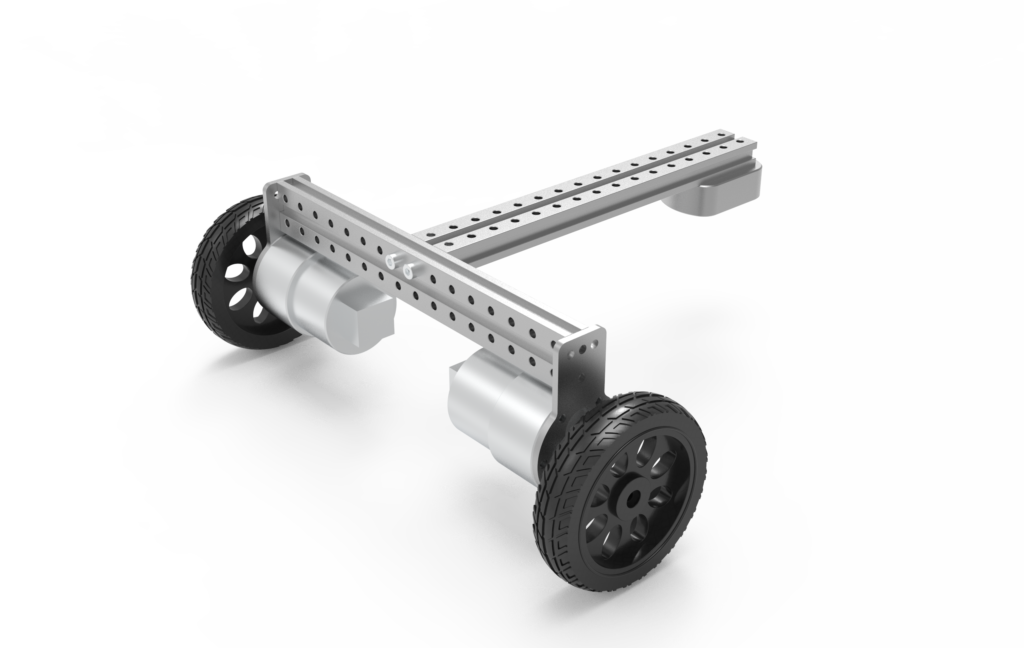
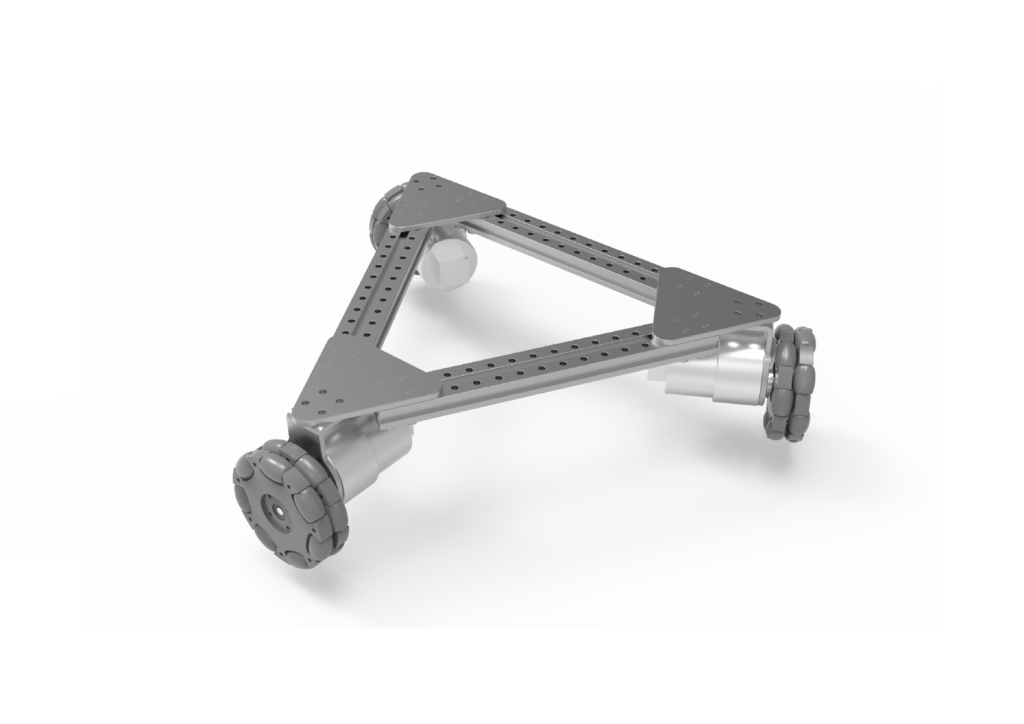
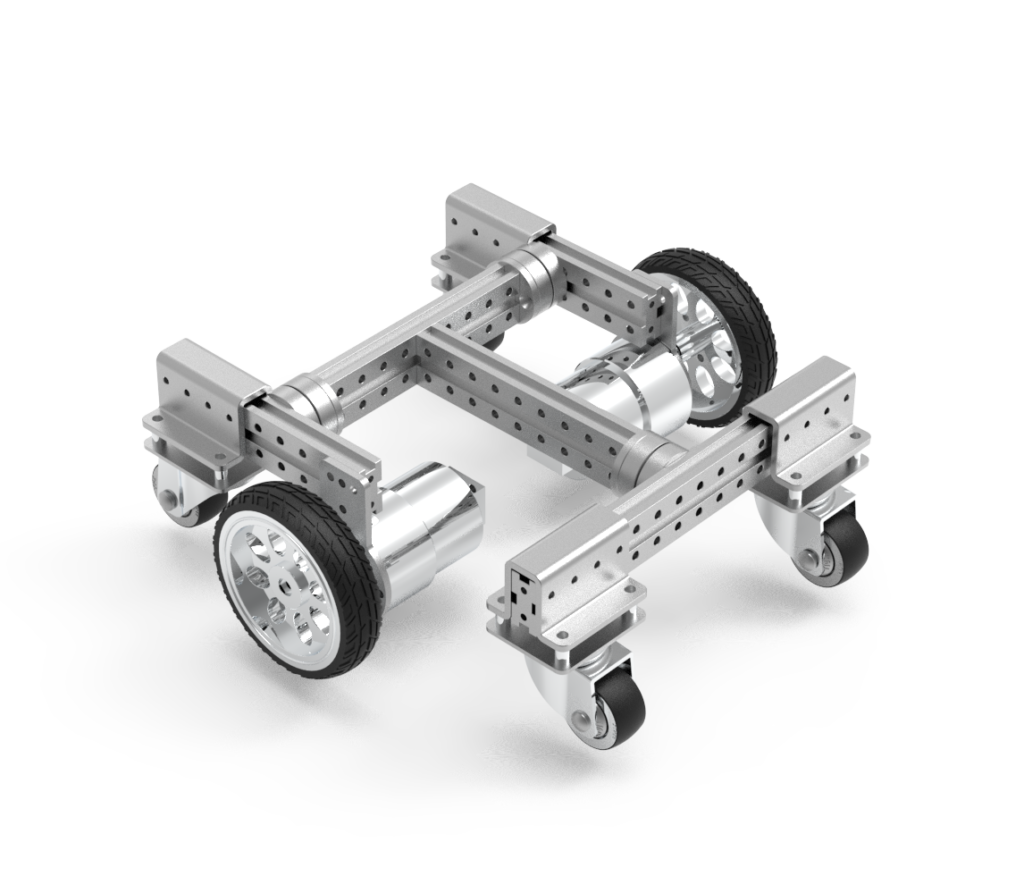
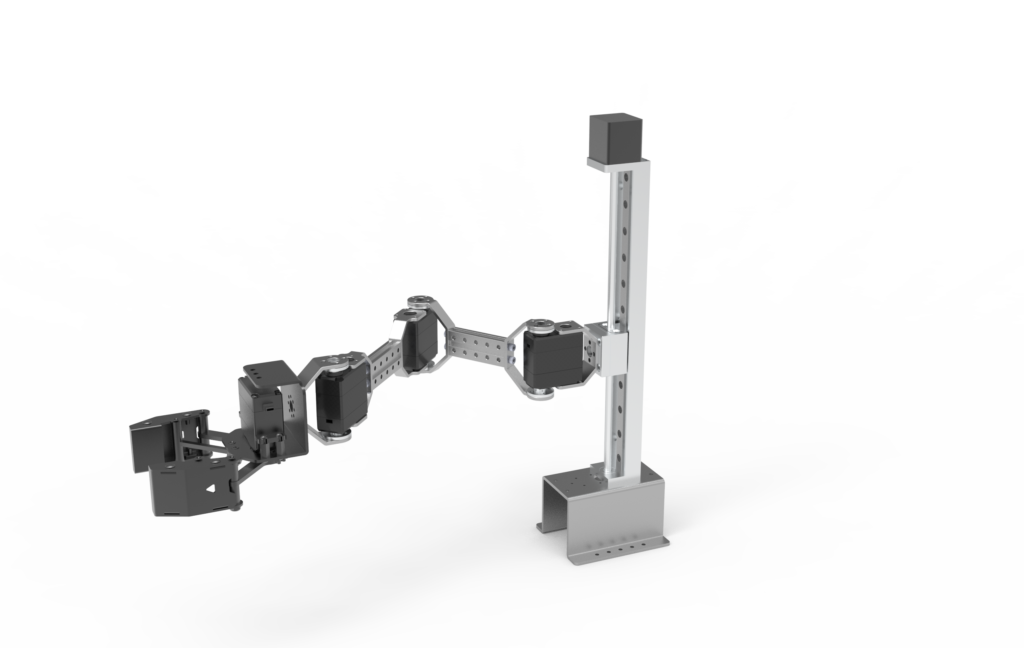
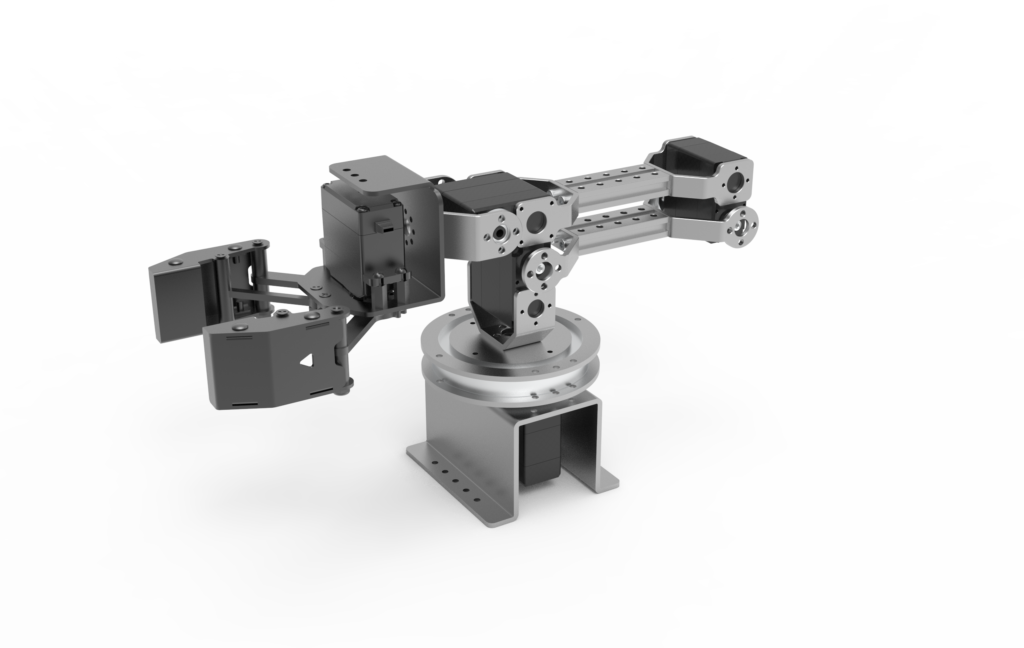
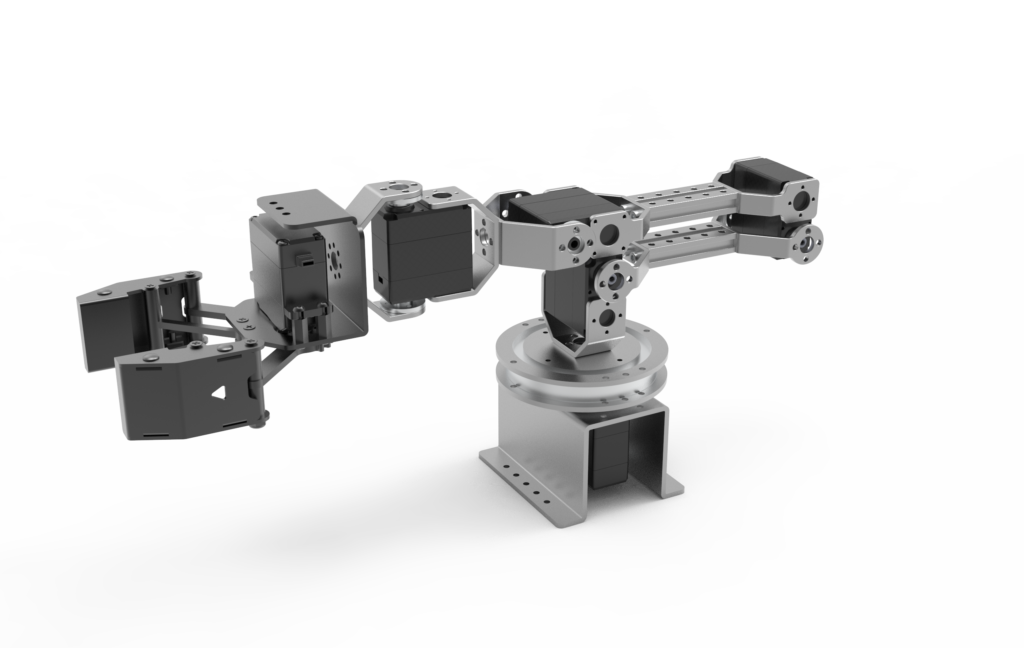
モデュール構成により、11種類のシャーシと7種類のロボットアームを自由に組み合わせ、最大88通りの構成を実現する。「設計・構築・制御」の一連のプロセスを実践的に体験できる。
AIビジョン、音声、姿勢検知、障害物回避、ライントレース、LiDARなどのセンサーを統合し、必要な知覚機能を網羅する。
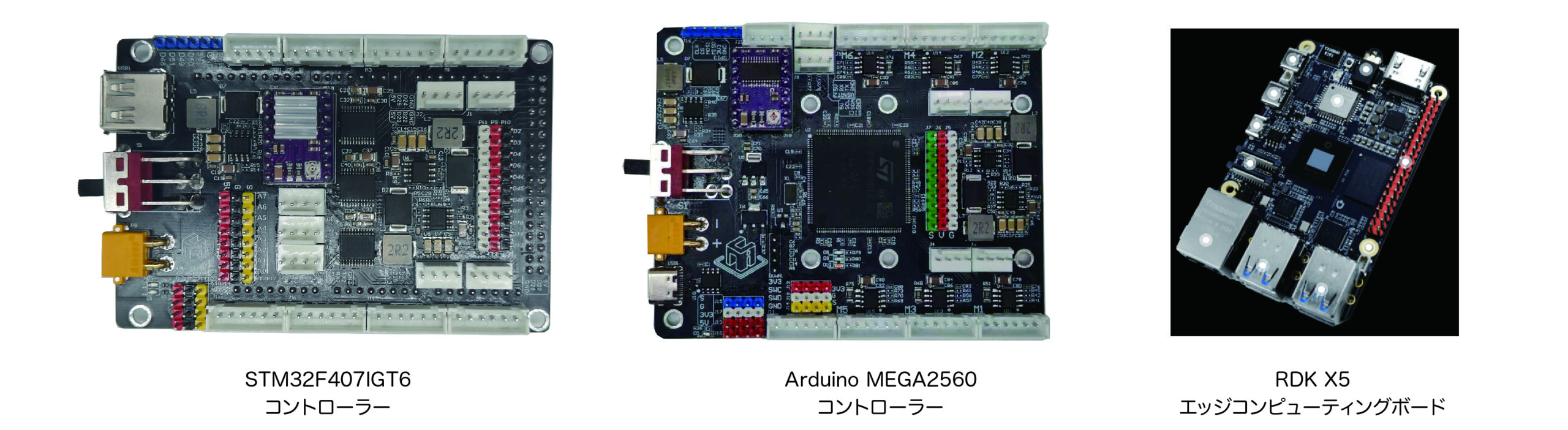
制御はArduino、STM32、RDK X5の三層構成を採用し、入門からUbuntu/ROSによる高度なAI応用まで対応する。教育・研究・競技など幅広い用途に対応する。