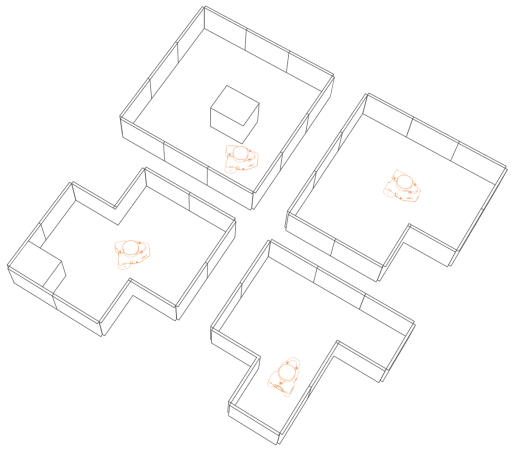
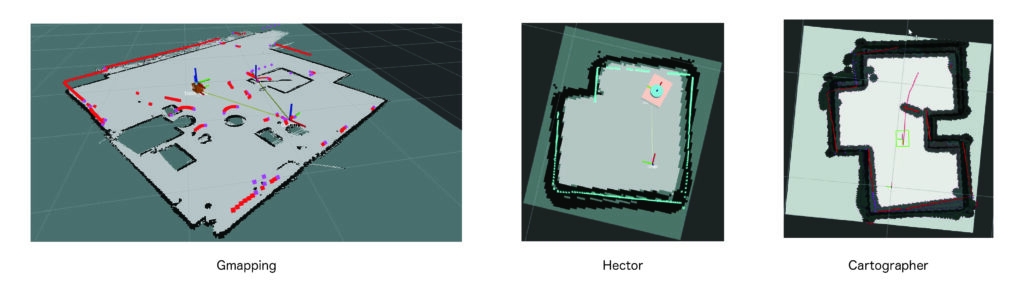
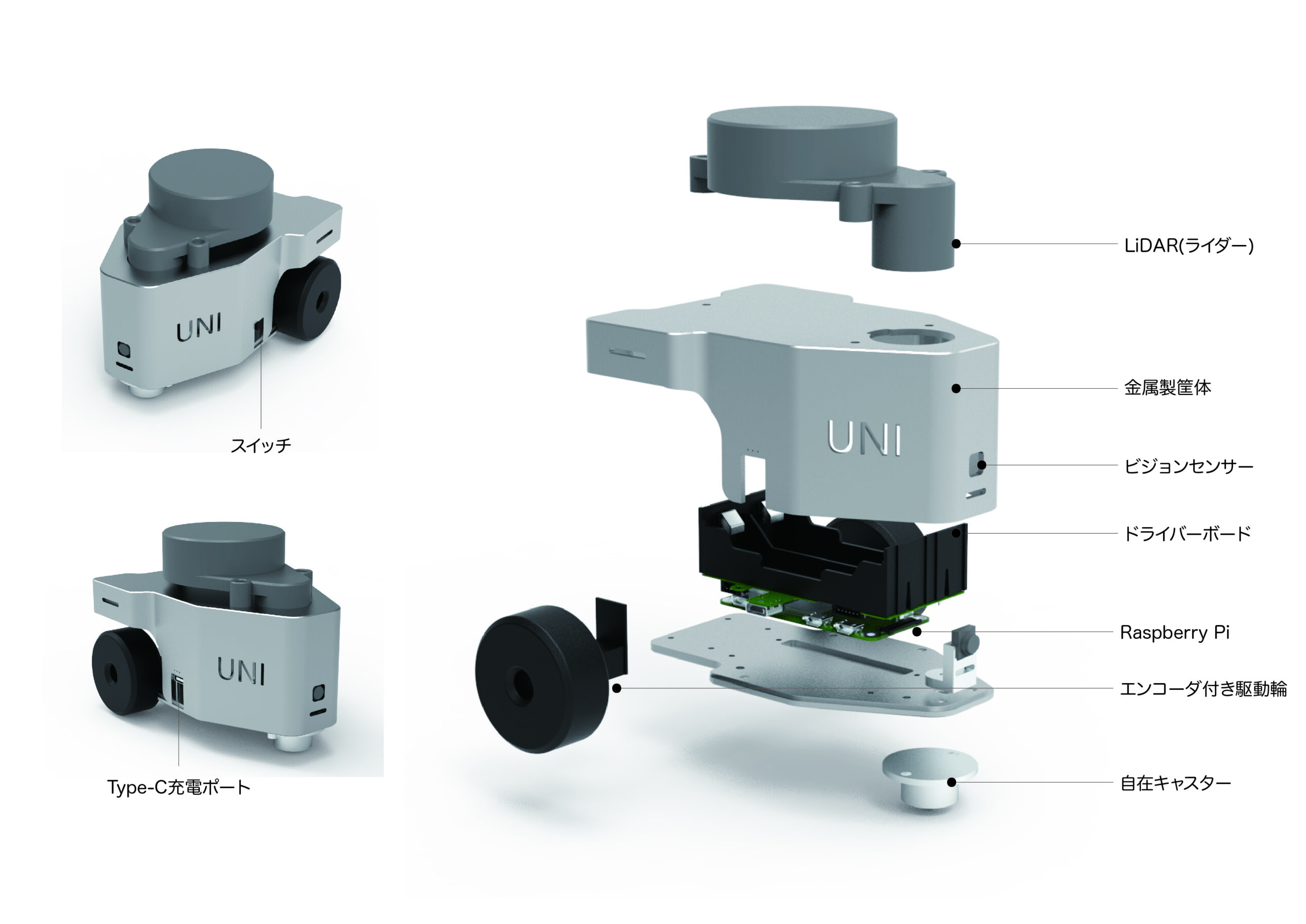
UNI-WR2S ポータブルROS / SLAM学習ロボット 机上から、実機のナビゲーションへ UNI-WR2Sは、ROSおよびSLAMナビゲーション教育向けに設計されたポータブルなデスクトップ型ロボットプラットフォームである。「ロボットオペレーティングシステム(ROS)」「移動ロボットのナビゲーションおよび自己位置推定」「自動制御(PID)」などの講義における実践的な演習に対応。従来のシミュレーション中心、あるいは広い実験環境を必要とする教育手法と異なり、UNI-WR2Sはポータブルなハードウェアとデスクトップ環境での運用、さらにROSのエンジニアリングプロセスを体系的に分解。実機ロボット上で、いつでもどこでもナビゲーションアルゴリズムの検証やパッケージ開発を行うことが可能。 ■ 対象分野・活用シーン ROS入門 SLAMナビゲーション PID制御 移動ロボット実習 エンジニアリング実践 製品特長 手のひらサイズ USB Type-C 充電対応 デスク上で自在に展開 ■ ポータブル学習モデル フルメタルのコンパクトボディを採用し、サイズは成人の手のひらよりも小型。Type-C充電ポートを搭載し、モバイルバッテリーでの給電にも対応。教室・実験室・出張先など、さまざまなシーンでの即時デバッグニーズに応える。 ■ デスクトップSLAM実験環境 わずか60cm四方のデスク上から始められるSLAM環境。手の届くコンパクトな操作範囲に加え、モジュール式パネルで最大1.2m四方まで拡張可能。多彩なナビゲーションコースをスピーディーに構築できる。 デスク上配置の俯瞰図 ■ ROS実装の体系的分解 原理フレームワーク、機能デモ、構成分解、機能パッケージ設定、全パラメータ調整に至る5段階の学習ステップを構築する。Cartographer・Hector・Gmappingの3大ナビゲーションアルゴリズムと組み合わせ、学生が実際のエンジニアリング実装手法を習得できるようにする。 仕様・スペック ■ 基本仕様 OS環境 Ubuntu/ROS(プリインストール) 構成 二輪駆動・三輪差動シャーシ コントローラー Broadcom BCM2710A1, quad-core 64-bit SoC (Arm Cortex-A53 @ 1GHz) 駆動方式 7ビットエンコーダモーター シャーシ構成 4輪メカナムホイール全方向移動シャーシ ナビゲーション方式 Cartographer / Hector / Gmapping(レーザーSLAM) 最大安定速度 0.16m/s 位置精度 1m以内における位置誤差5mm未満 直進精度 1m走行時の直線偏差1cm未満(約1.5°) 寸法 130mm(W) x 97mm(D) x 98mm(H) 重量 580g 電源 内蔵バッテリー (連続稼働時間4時間以上) USB Type-C充電 付属品 USB Type-Cケーブル(約1.5 m)×1(ACアダプター付属) ■ センサー構成 SLAMナビゲーションに必要な各種センサーを統合し、オドメトリフィードバック、姿勢推定、環境マッピングに対応。実環境におけるナビゲーションアルゴリズムの入力データ取得を実現。 LiDARセンサー(上部搭載) 外径:62 mm以下,測定距離:0.1~10 m,サンプリング周波数:10 Hz ホイールエンコーダ デュアル構成、PID制御およびオドメトリフィードバックに対応 IMU/ジャイロセンサー 姿勢推定に対応 拡張インターフェース 外部センサーおよびマーカーの接続に対応 ■ 制御構成 Raspberry Piを中核とした制御システムを採用。PIDモータドライバおよび電源管理機能を内蔵し、ワンボタンでの起動・復帰に対応。授業でのデモンストレーションや大量導入にも適した設計。 実験項目 ロボットビジョン 基礎的な画像処理から深層学習、マルチモーダル認識まで、一貫した実践学習の流れを構築。 ■ OpenCVビジョン ・色認識、形状認識、QRコード認識、バーコード認識 ・カラーマーカー検出(総合処理+フィルタリング) ■ AIビジョン – YOLO ・YOLOモデルの導入・デプロイ ・データセットのアノテーション、学習、デプロイ ・ワーク検出 ・顔検出 ■ AIビジョン – 通義千問マルチモーダル大規模モデル ・通義千問マルチモーダルAPIの導入・デプロイ ・物体検出およびラベリング 大規模モデルの導入と応用 音声インタラクション、マルチモーダル認識、ロボット実行を統合した、エンドツーエンドのAIモデル実践にフォーカス。 ■ 音声対話インタラクション ・音声認識(ASR)の導入・実装 – 通義千問 ・意味理解(LLM)の導入・実装 – DeepSeek ・音声合成(TTS)の導入・実装 – 火山引擎 ・大規模モデルを活用した音声対話機能の実装 ・音声対話による電卓機能の実装 ・音声対話による音楽再生機能の実装■ マルチモーダル視覚認識 ・通義千問マルチモーダルAPIの導入・デプロイ ・物体検出およびラベリング■ ロボット応用との連携 ・MCPに基づく認識・把持タスクプランニング ・MCPに基づくナビゲーションタスクプランニング ロボット本体 シャーシおよびロボットアームの運動学と制御戦略に関する実践。 ■ モバイルベース制御 ・エンコーダ付きモータのPID制御 ・全方向移動ベースの運動学制御 ・全方向移動ベースのオドメトリ制御(ジャイロセンサ含む)■ ロボットアーム本体制御 ・サーボモータの位置制御 ・ロボットアームの運動学制御 ・ロボットアームの補間軌道制御 ロボットオペレーティング システム(ROS) ROSのトピック、サービス、パラメータ管理およびMoveItによるモーションプランニングなどの中核スキルを習得。 ■ ROSの基礎操作 ・Topic、Service、Parameter による turtlesim の移動制御 ・パッケージ移植と実行 – キーボードによる turtlesim 制御■ Moveit! によるロボットアーム動作計画 ・ロボットアームのURDFファイル設定 ・Moveit! によるロボットアーム運動学モデルの設定 ・RViz によるロボットアーム動作計画の実現 移動ロボットのナビゲーション と自己位置推定 システムインターフェース、マッピングおよびナビゲーションの一連のプロセスを網羅し、マルチポイントナビゲーションの実践に対応。 ■ 地図構築 ・マッピング用プロジェクトファイルの設定 ・新規地図の構築 ■ 地図ナビゲーション ・指定点ナビゲーションの実装 ・自律回避ナビゲーションの実装 ・複数座標ナビゲーションの実装