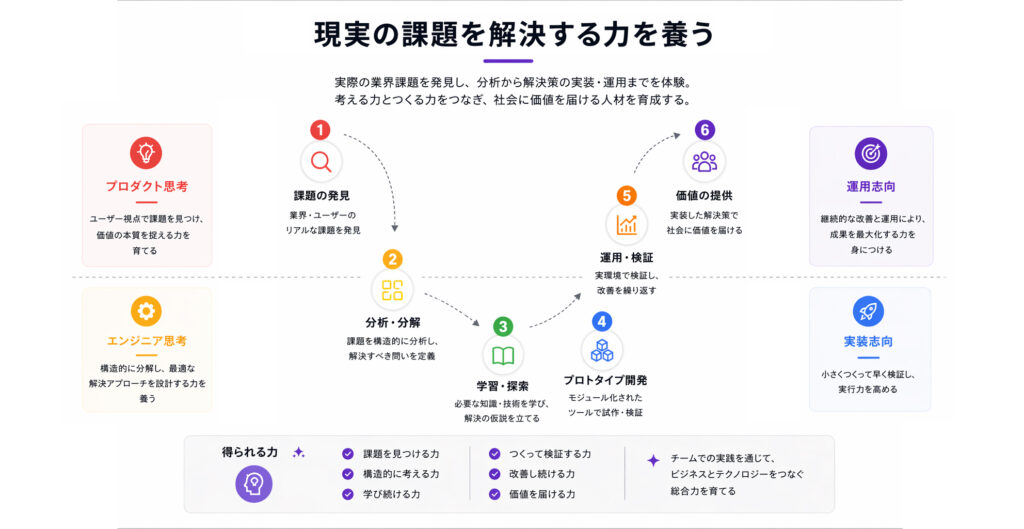
■ 業界課題の抽出
実際の産業・競技・エンジニアリング現場から「真の課題」を抽出する。仮想的な演習ではなく、実社会に根ざした課題を対象とする。
各業界の実課題を体系化し、100件以上の課題データベースを構築。ロボットの実用シーンを具体的に理解できる環境を提供する。
■ タスクシナリオ分析
課題を実行可能なタスクへ分解し、目的・制約・成果物を明確化する。
実課題の共通要素を抽出し、10種類の汎用タスクシナリオを体系化。学習者はシナリオに基づき、タスク分析と機能要件の整理を行う。
■ 学習チャレンジ設計
タスクに必要な知識・スキル・ツールを整理し、学習項目として構造化する。
ロボット本体・認知・制御・アルゴリズム・知能設計を網羅した、段階的なエンジニアリング知識ベースを構築。学習者はタスクから学習パスを設計し、段階的に知識を習得する。
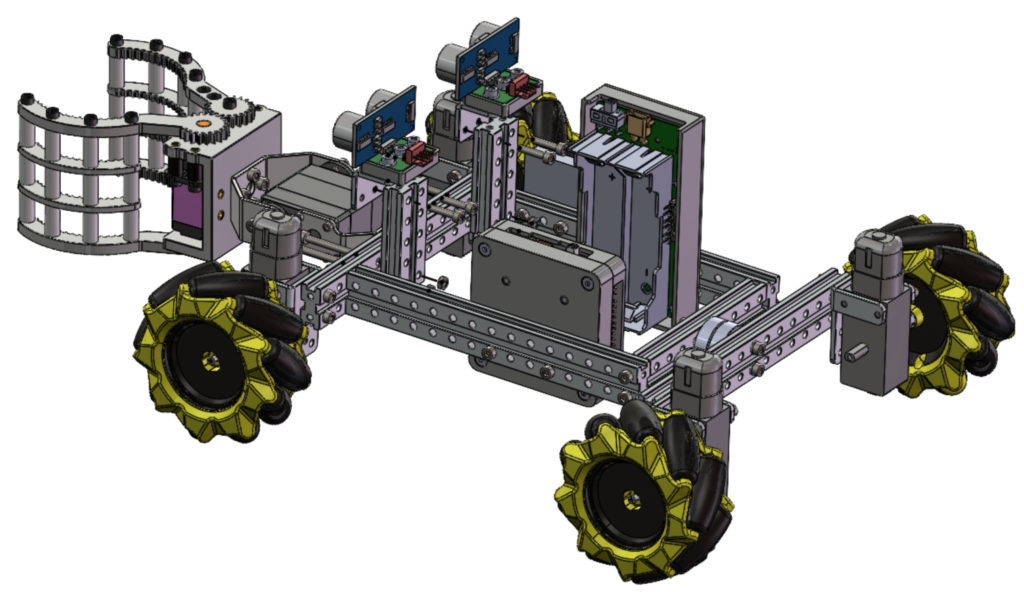
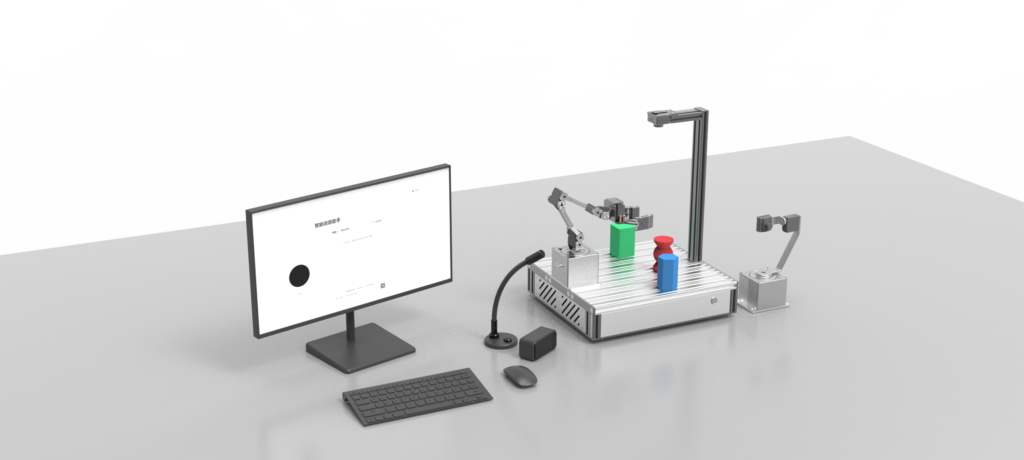
■ ソリューション構築(モデュール型)
知識ベースに基づき、0→1検証を支援する実装ツール群を提供。
標準化されたハード/ソフトモジュールを組み合わせ、ブロック感覚で迅速にソリューションを構築可能とする。開発ハードルを下げ、システム設計に集中できる環境を実現。
■ 実課題解決力の定着
小規模プロジェクトを通じて、課題発見から実装までを一貫して実践する。
実装・検証・改善のプロセスを通じて、以下の能力を統合的に習得:
プロダクト思考/エンジニアリング思考/システム設計力/実践経験