The GX-MAT-09S is an embodied intelligence robotics training platform designed for systematic learning of robot structure, actuation, and intelligent systems.
Embodied intelligent robots integrate perception, decision-making, and manipulation for operation in unstructured environments, typically as mobile composite robots.
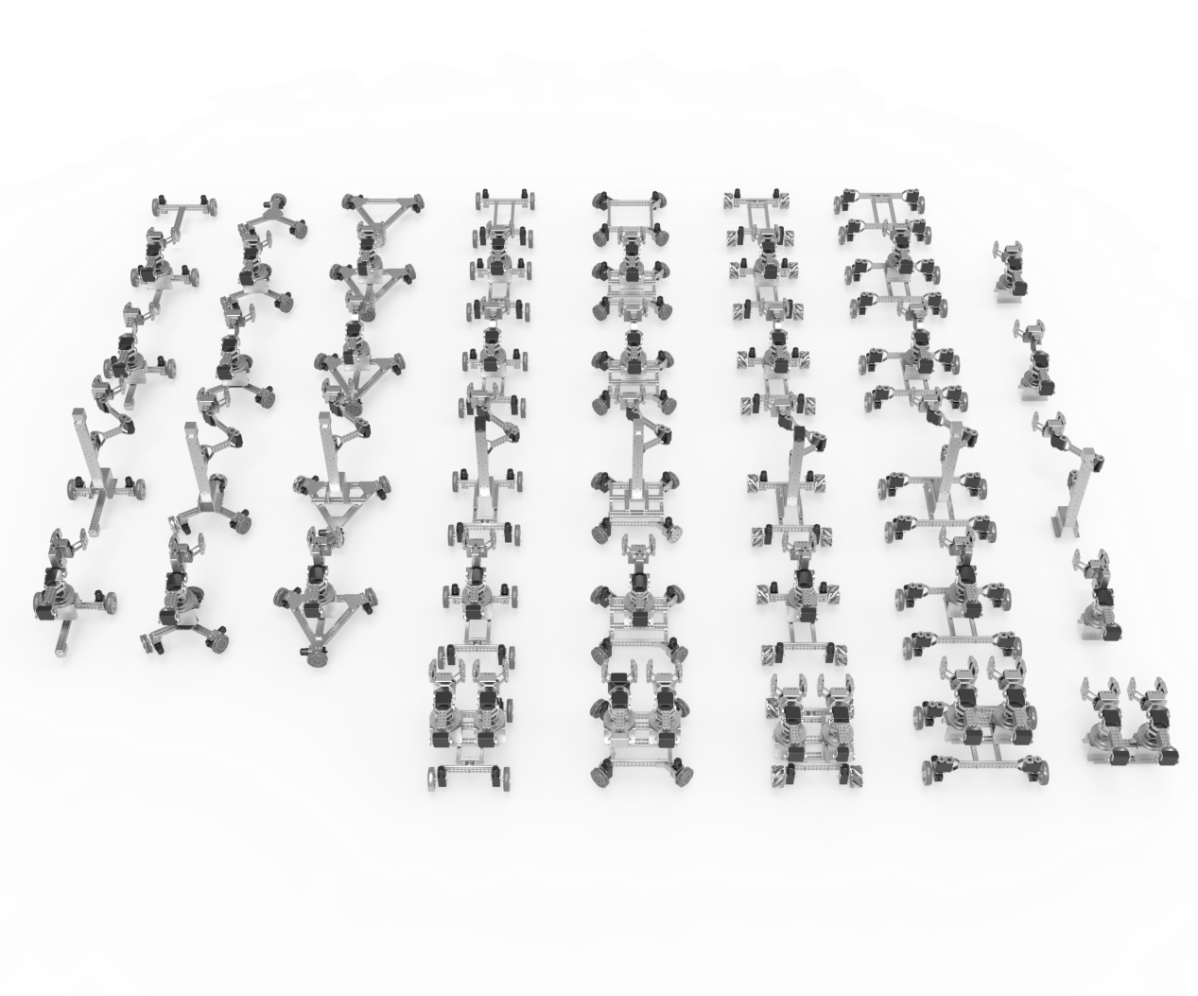
This platform decomposes a typical embodied composite robot into modular units, enabling deeper understanding of structure, actuation, and intelligent systems.
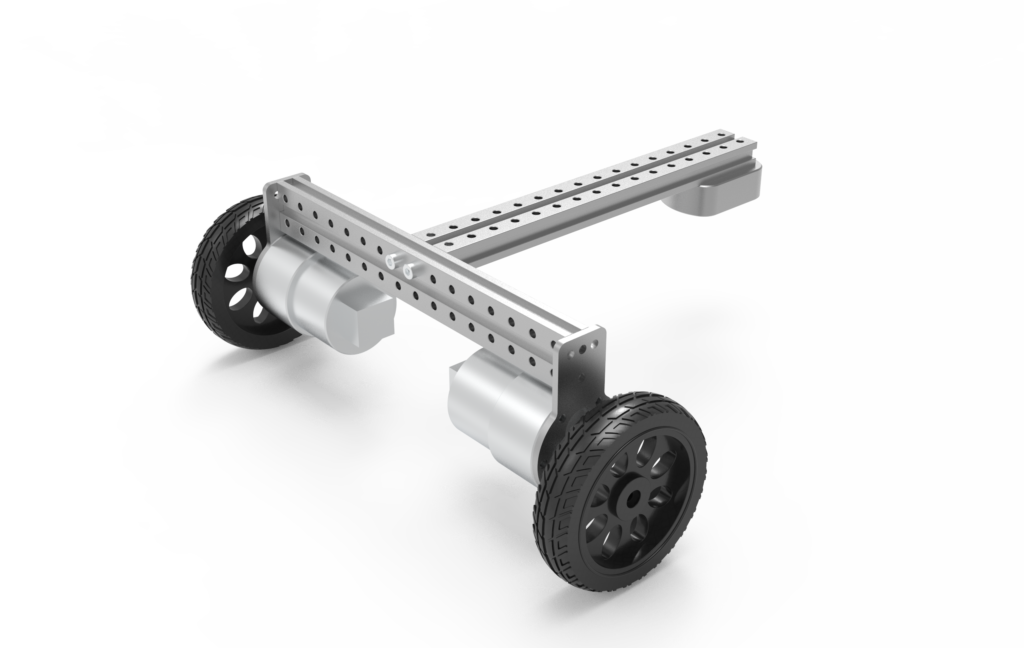
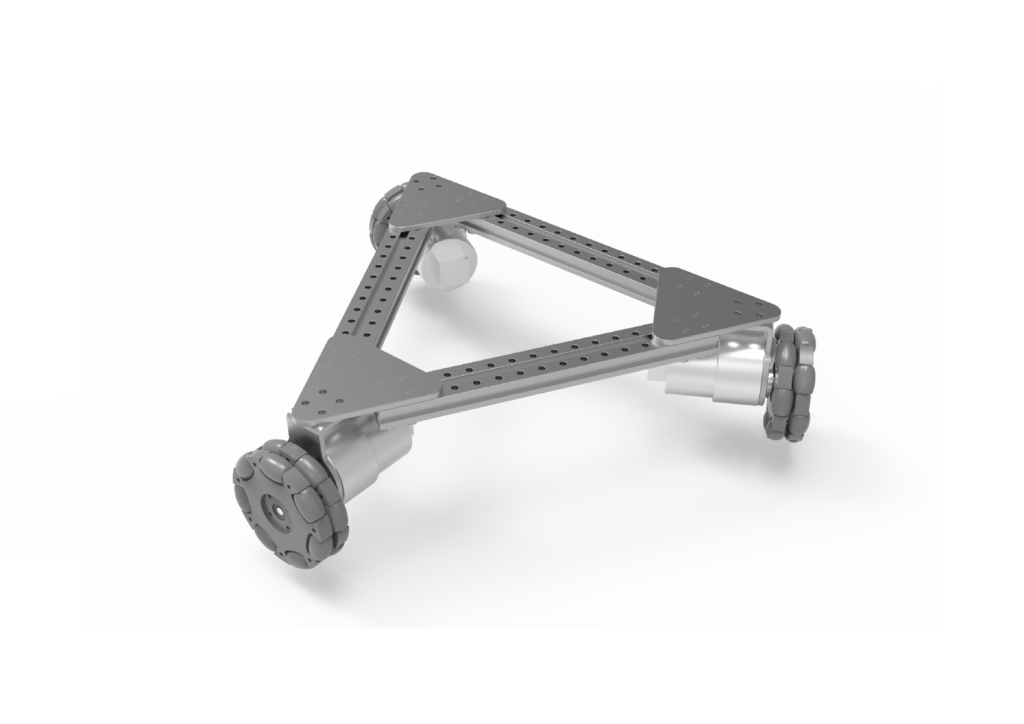
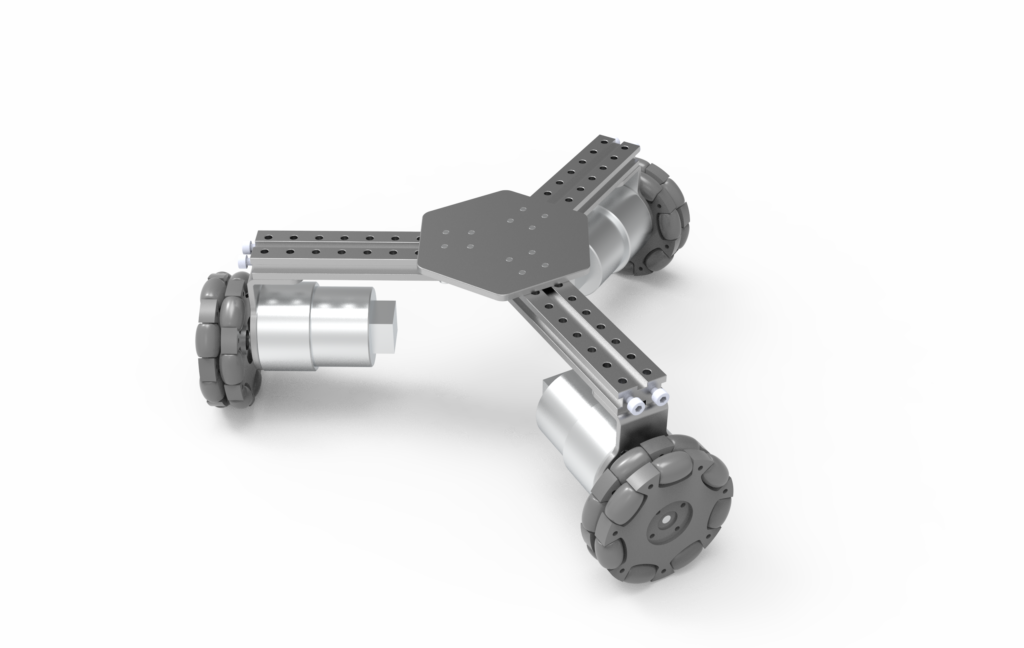
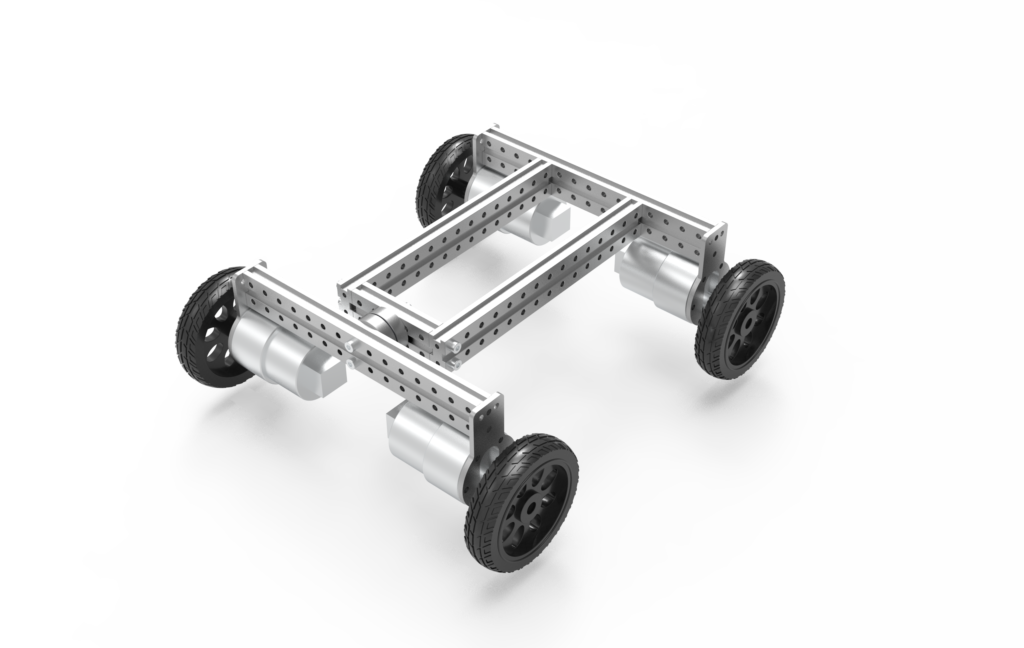
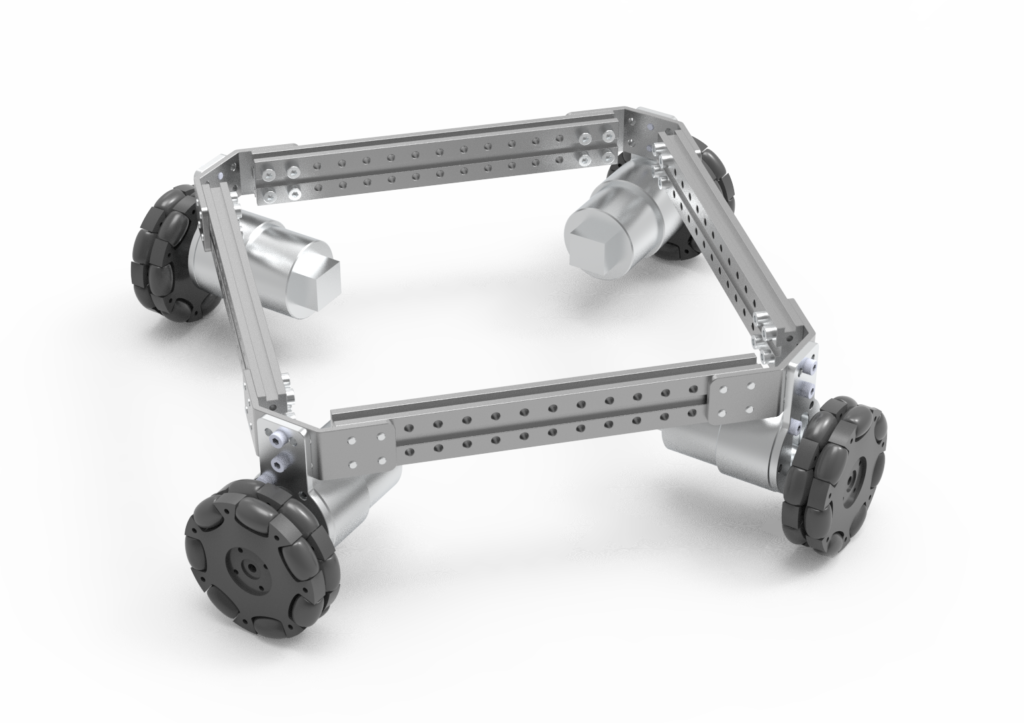
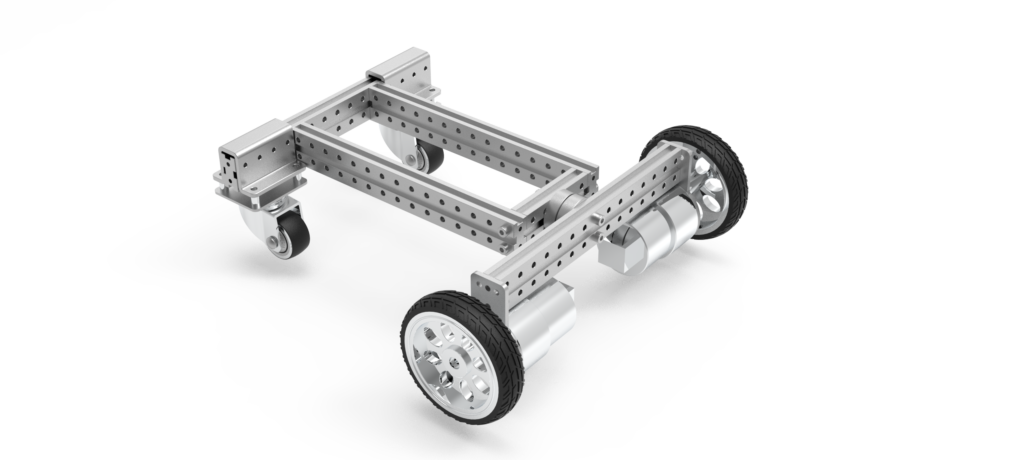
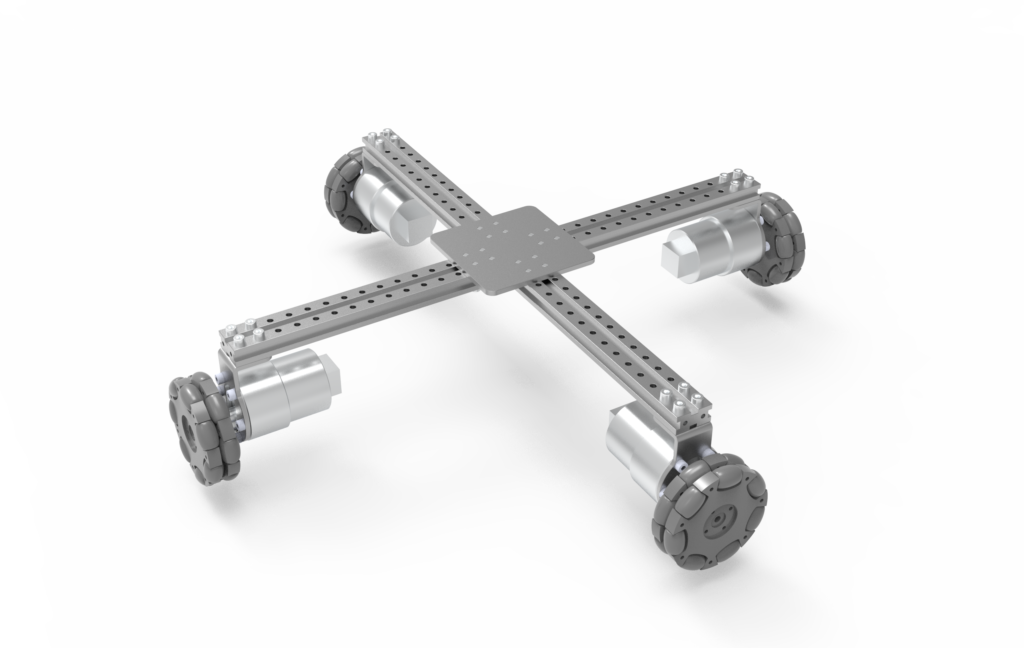
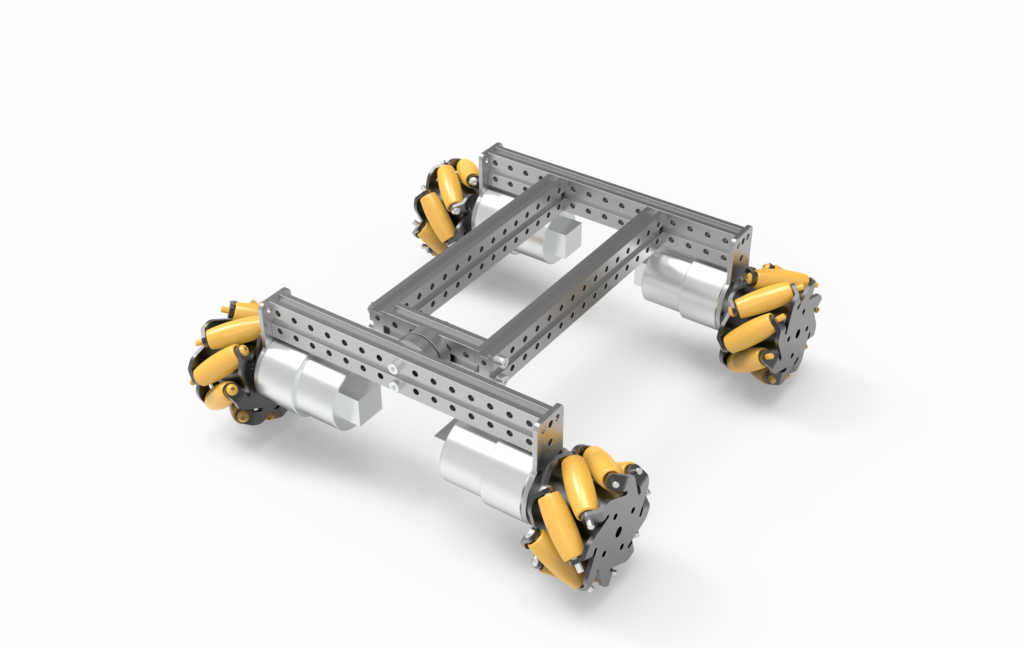
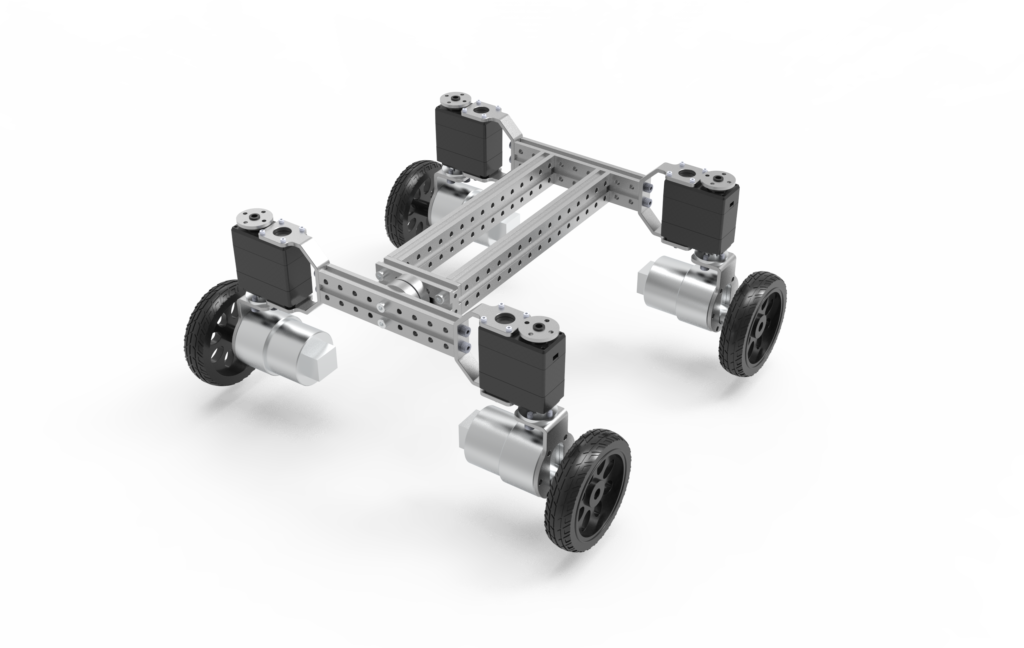
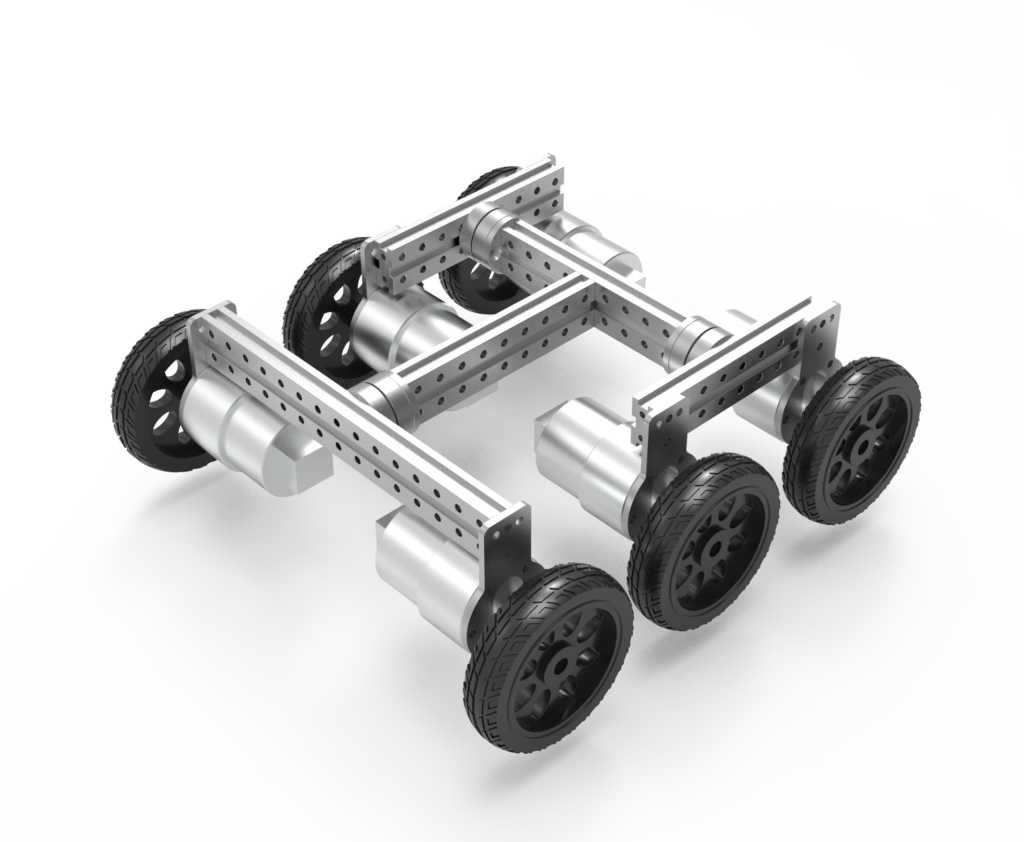
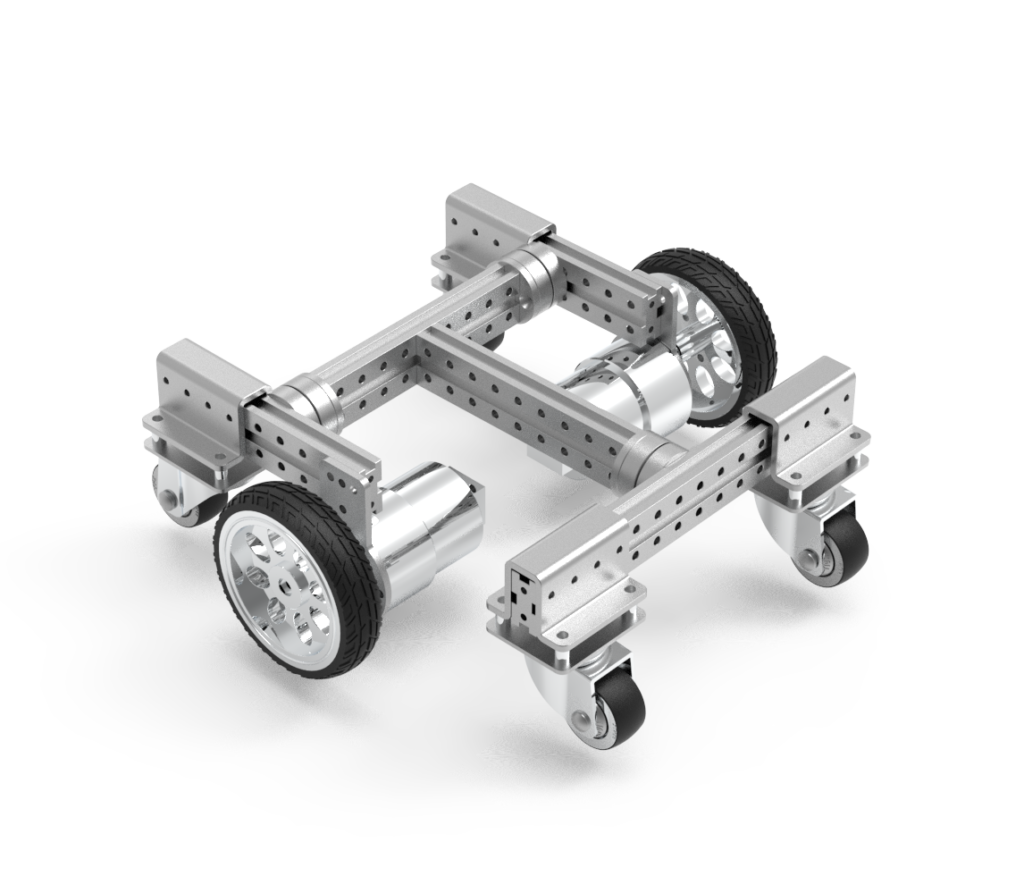
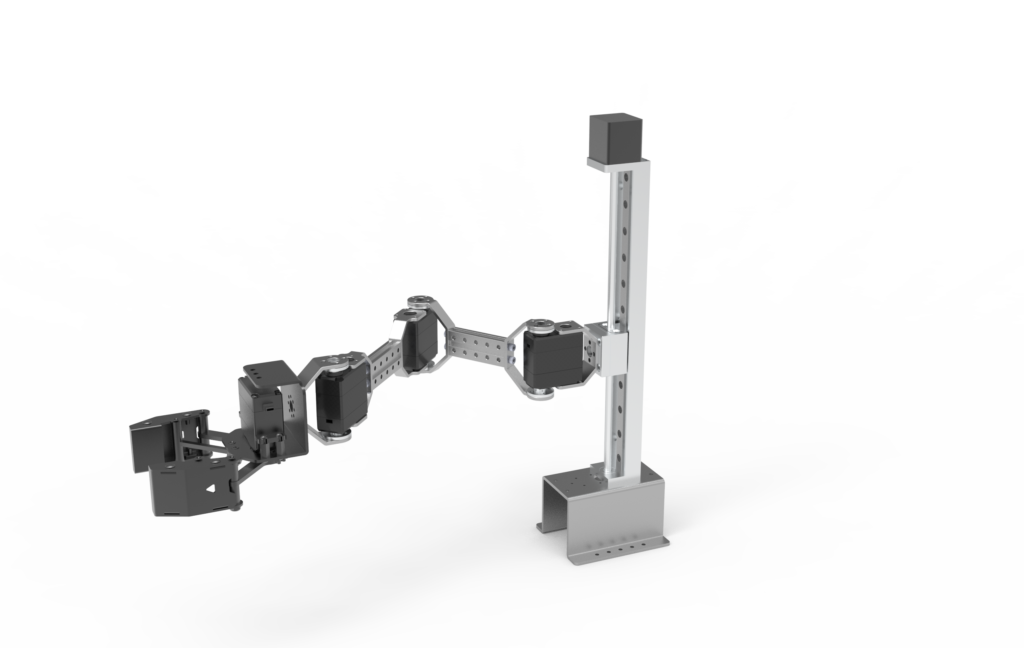
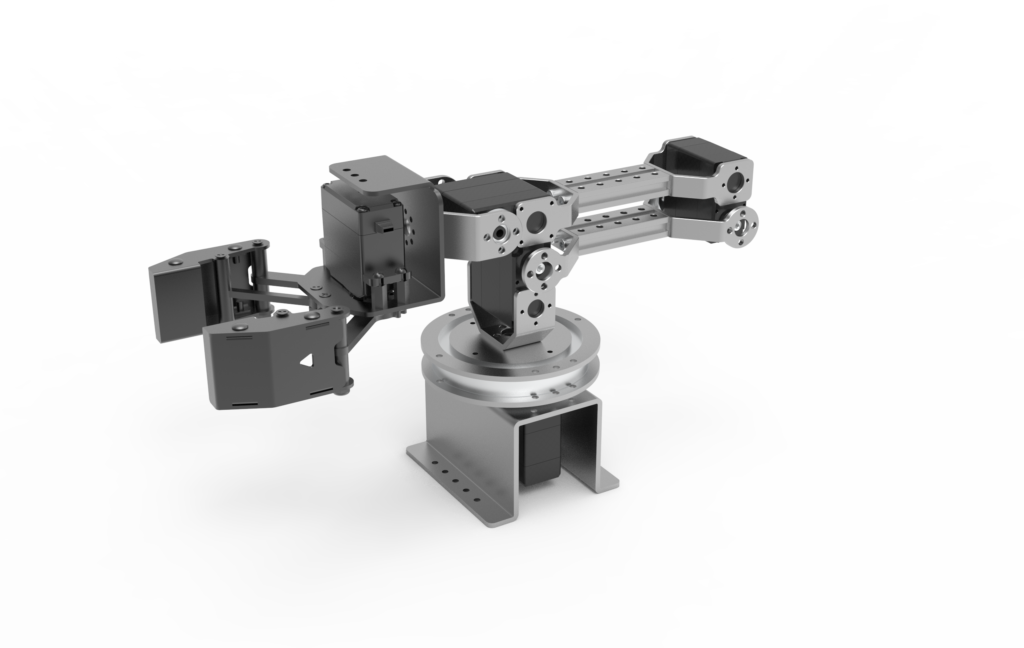
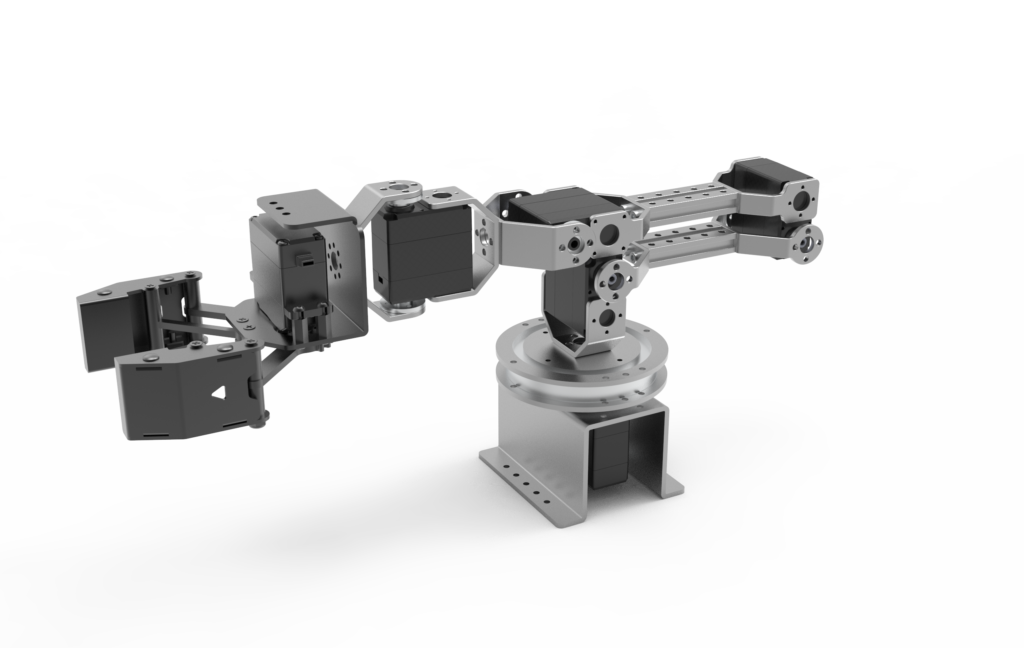
Through a modular architecture, 11 types of chassis and 7 types of robotic arms can be freely combined to achieve up to 88 configurations, enabling hands-on experience of the full process from design, construction, to control.
Integrates AI vision, voice, pose detection, obstacle avoidance, line tracking, LiDAR, and other sensors for comprehensive perception.
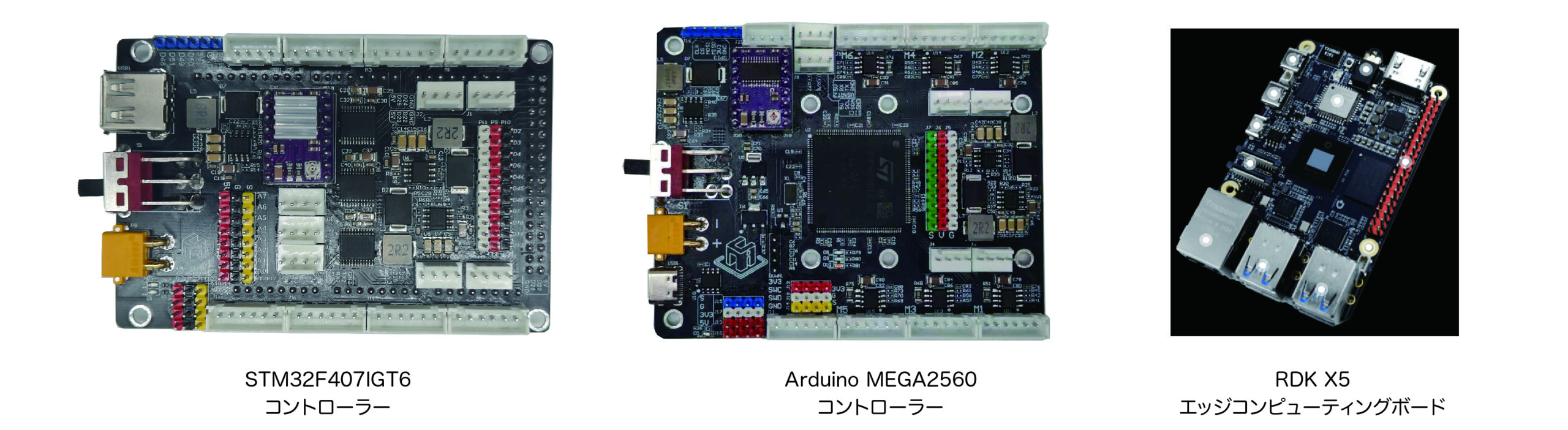
The control system adopts a three-layer architecture based on Arduino, STM32, and RDK X5, supporting applications from entry-level learning to advanced AI development with Ubuntu and ROS. It is suitable for a wide range of use cases, including education, research, and robotics competitions.