Focused on end-to-end AI model practice integrating voice interaction, multimodal perception, and robotic execution.
■ Voice Interaction
・Qwen ASR Integration and Implementation
・DeepSeek LLM-Based Semantic Understanding
・Volcano Engine TTS Integration and Implementation
・LLM-Based Voice Interaction Implementation
・Implementation of Voice-Controlled Calculator Functionality
・Implementation of Voice-Controlled Music Playback
■ Multimodal Visual Perception
・Qwen Multimodal API Integration and Deployment
・Object Detection and Labeling
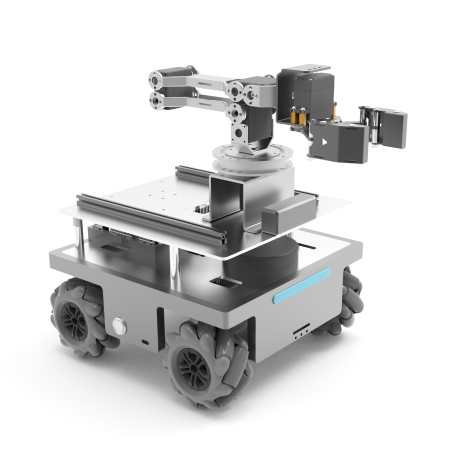
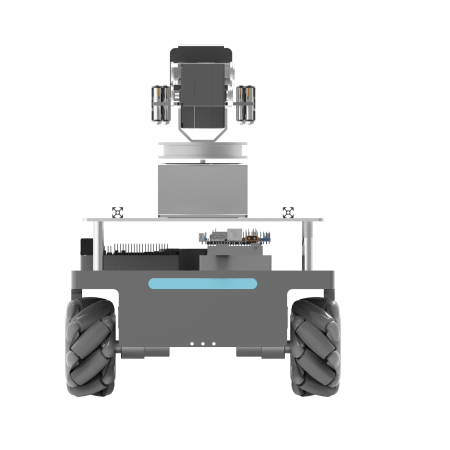
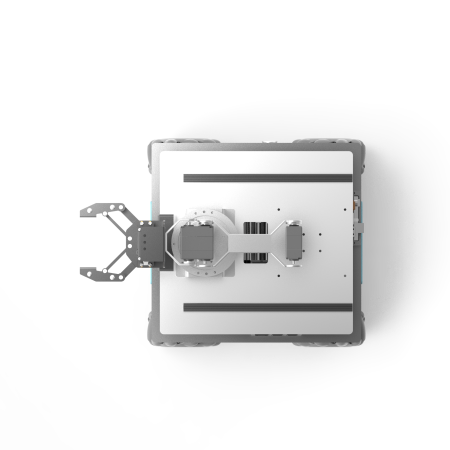
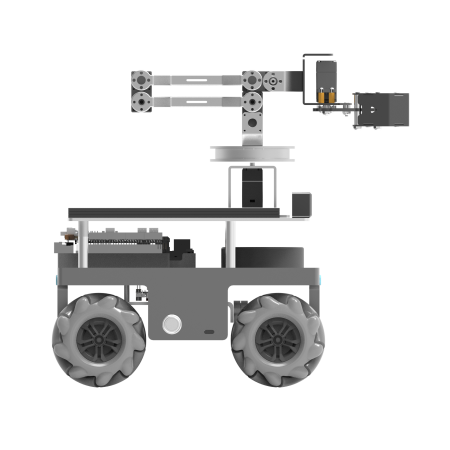
■ Integration with Robotic Applications
・MCP-Based Perception and Grasping Task Planning
・MCP-Based Navigation Task Planning