PBL-Based Development Training System
Concept
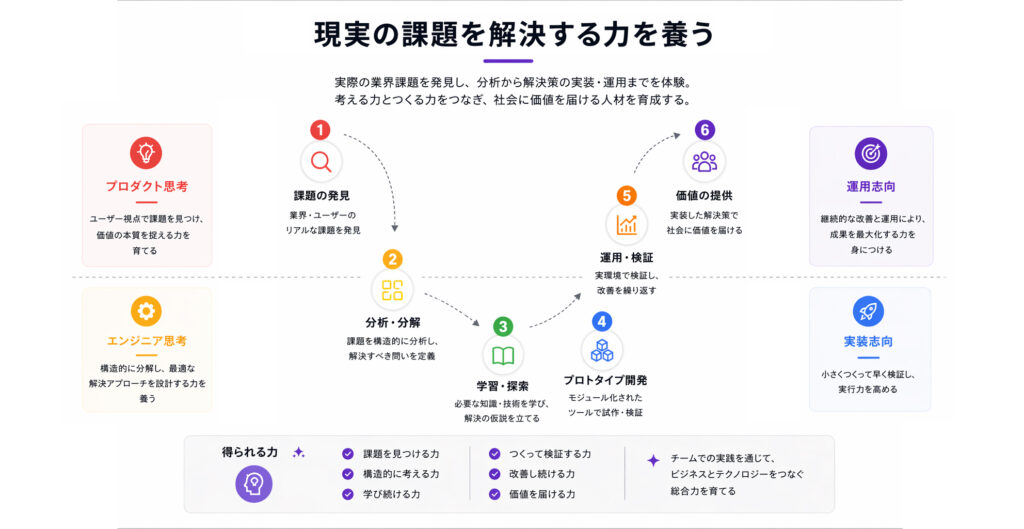
Based on Project-Based Learning (PBL), this system is a learning platform designed to develop practical problem-solving skills for real-world challenges.
It offers an end-to-end learning framework—from identifying industry challenges and analyzing tasks to hands-on challenge-based learning and modular solution development—realizing a U-shaped learning model that strengthens problem-solving skills through practice.
System Configuration and Solutions
■ Industry Challenge Identification
This approach identifies real-world challenges directly from industrial, competitive, and engineering settings, emphasizing practical, real-life problems rather than virtual or simulated exercises.
By structuring real-world challenges across industries into a database of over 100 cases, it provides an environment that enables a clear, practical understanding of real robotic application scenarios.
■ Task Scenario Analysis
Decompose problems into executable tasks while clearly defining objectives, constraints, and expected deliverables.
By extracting common elements from real-world challenges, the system organizes them into 10 generalized task scenarios, where learners conduct task analysis and define functional requirements based on each scenario.
■ Learning Challenge Design
Identify and structure the knowledge, skills, and tools required for each task into organized learning components.
A structured, progressive engineering knowledge base is built, covering robotics hardware, perception, control, algorithms, and intelligent system design. Learners design learning paths based on tasks and gradually acquire knowledge in a step-by-step manner.
■ Modular Solution Development
It provides a suite of implementation tools that support zero-to-one validation based on the knowledge base.
Standardized hardware and software modules can be combined in a block-based approach to rapidly build solutions, lowering development barriers and enabling users to focus on system design.
■ Consolidation of Real-World Problem-Solving Skills
Learners work through small-scale projects to gain hands-on experience across the full workflow, from problem identification to implementation.
By going through implementation, validation, and improvement cycles, learners develop the following integrated capabilities:
Product Thinking / Engineering Thinking / System Design Skills / Hands-on Experience
Toolkit Introduction
■ Industry Challenge Database
Covers approximately 100 real-world challenges across 10+ industries.
Each challenge is analyzed from functional, robotic system, and market value perspectives, providing foundational data to deepen understanding of real-world robotic applications.
■ Task Scenario Examples
Scenario 01
Robotic Logistics and Transport Scenario
#Logistics
#Transport
#Autonomous Navigation
Project Requirements
■ Robot Body
Features a wheeled mobile base and a grasping mechanism with at least one degree of freedom.
■ Control Method
Supports one or more control methods, including autonomous, manual, remote, and voice control.
■ Intelligent Capabilities
Implements intelligent functions such as voice interaction, autonomous obstacle avoidance, and autonomous path planning.
Sample Works
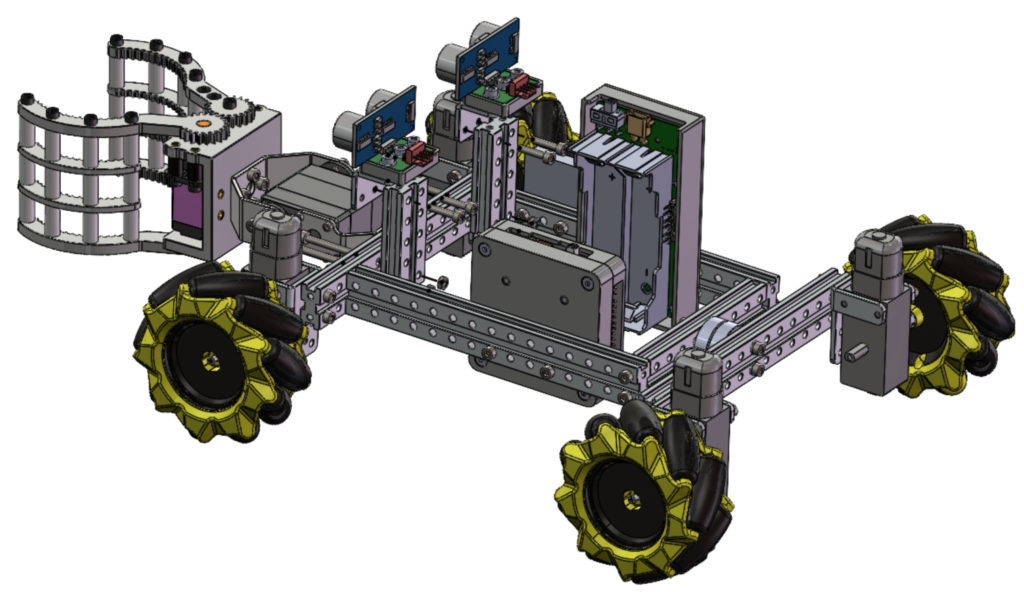
Scenario 02
All-Terrain Farming Harvesting Robot Scenario
#Agriculture
#Harvesting
#All-Terrain Mobility
Project Requirements
■ Robot Body
Features an all-terrain mobile base and a manipulator with at least 4 degrees of freedom for grasping.
■ Control Method
Supports multiple control modes, including autonomous, manual, remote, and voice control.
■ Intelligent Capabilities
Implements capabilities including autonomous obstacle avoidance, autonomous path planning, and crop image recognition.
Sample Works

Scenario 03
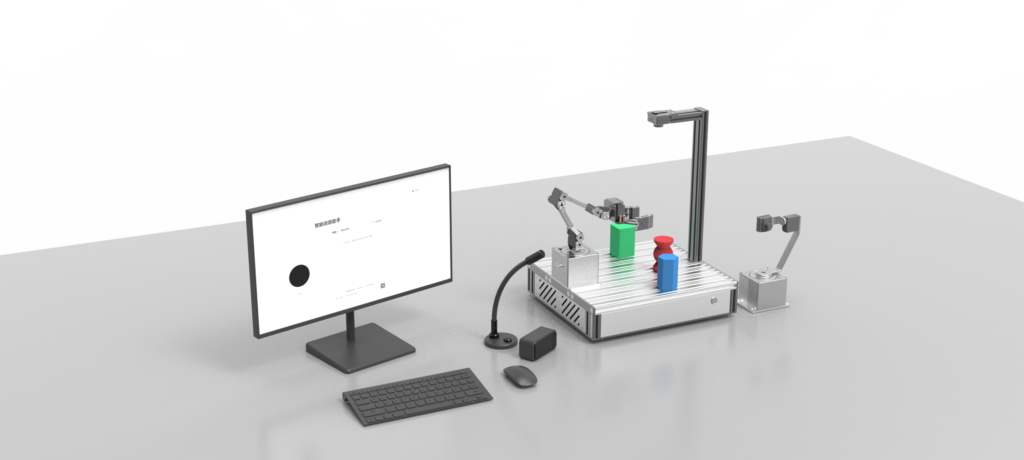
Robotic Arm Autonomous Recognition and Assembly Scenario
#Logistics
#Transport
#Visual Recognition
Project Requirements
■ Robot Body
Features a robotic arm with 4 or more degrees of freedom.
■ Control Method
Implements LLM-based voice interaction and autonomous operation.
■ Intelligent Capabilities
Implements autonomous task flow planning and VLM-based visual perception.
Sample Works